车东西(公众号:chedongxi)
作者 | 车东西团队
编辑 | 晓寒
车东西1月5日消息,就在今天,GTIC 2022全球自动驾驶峰会正式在深圳拉开序幕,多个行业专家、自动驾驶企业代表、自动驾驶传感器供应商代表齐聚一堂,共同为自动驾驶行业的发展提出了各自的真知灼见。
本次峰会由智一科技旗下智能汽车产业新媒体车东西、人工智能与新兴科技知识分享平台智东西公开课联合主办,以“加速落地 砥砺前行”为主题,共设置了自动驾驶高峰论坛、量产自动驾驶专题论坛、自动驾驶芯片与域控制器专题论坛和L4级自动驾驶专题论坛四个论坛,共有19位嘉宾带来了18场主题演讲和致辞。
峰会受到了各地赶来的自动驾驶工程师、创业者、投资人的热情支持,全天都座无虚席,甚至还需要专门为观众增加座位,全网观看直播的人数高达150万人。
国内自动驾驶领域资深研究学者,西安交通大学教授,中国自动化学会会士薛建儒教授对类人自动驾驶进行了思考,为本次自动驾驶峰会拉开了序幕。
集度汽车、小鹏汽车和长城沙龙分别分享了自己在量产自动驾驶方面的思考;元戎启行、如祺出行、小马智行、文远知行等Robotaxi创企则分享了自己在无人驾驶出租车和L4级自动驾驶降维L2方面的进展;Nullmax纽劢科技、领骏科技、映驰科技等从量产自动驾驶供应商的角度做出了思考;黑芝麻、后摩智能、探维科技则分别从自动驾驶芯片和激光雷达方面对自动驾驶的发展做出了思考;盟识科技、于万智驾则介绍了L4级自动驾驶领域细分赛道的发展情况。
整个演讲过程中,多个大佬都抛出了非常有趣的观点,数次赢得观众的掌声,直播过程中也刷屏不断,火热的气氛将自动驾驶峰会的盛况推到了高潮。
那么,2022年自动驾驶行业究竟发生了哪些变化?2023年自动驾驶行业又该如何发展?自动驾驶的最终形态应该如何?车东西详细梳理了18位大咖分享的干货,看行业大咖如何位自动驾驶行业的发展把脉。
一、国内自动驾驶火热发展 正快速迭代发展
智一科技联合创始人、CEO龚伦常代表主办方致辞,他表示,最近几年,在政策、能源变革以及智能化的驱动下,中国的汽车产业正迎来新一轮发展和赶超良机,自主新能源车企崛起,出口快速增长,L2级辅助驾驶的渗透率超过30%。另一方面,L4高等级自动驾驶赛道变化较大,欧美多家知名创企倒闭或陷入破产边缘,国内的玩家则各显神通,要么在量产自动驾驶赛道落地,要么在封闭场景中实现商业化。行业的剧烈变化呼唤更多的交流与对话。
龚伦常介绍到,今年的峰会围绕自动驾驶的学术研究、Robotaxi、车载计算平台、激光雷达、多传感器融合自动驾驶、纯视觉自动驾驶、域控制器以及自动驾驶的落地应用等方向设置了多个话题。

▲智一科技联合创始人、CEO龚伦常
龚伦常对此提出期许,希望通过专注于不同方向的玩家的交流探讨,能进一步拨开行业发展的迷雾,推动创新和技术的落地应用。同时,龚伦常也表示,希望自动驾驶峰会成为技术研讨、产业交流与落地对接的重要平台。
龚伦常表示,今年是智一科技成立的第7个年头。这些年,智一科技坚持技术和产业双轮驱动,聚焦数字化和智能化进程中的关键技术及其在行业中的应用,持续提供优质、专业的内容,已成为国内定位独特且具有较高的影响力和公信力的产业媒体。目前已经形成了以车东西、芯东西、智东西为代表的产业新媒体矩阵。
同时,针对产业升级需求,智一科技着力发展出以智东西公开课为核心的企业服务体系。围绕自动驾驶、人工智能等领域的重点技术方向,与产业优秀公司合作,举办系列talk;也与全球顶级高校的专家学者合作,举办关注前沿研究的新青年讲座;还与国内外顶级企业合作举办契合企业需求的定制公开课。截止目前,已经完成的课程超过600节,在行业获得了不错的口碑。
国内自动驾驶领域的学术专家、西安交通大学教授薛建儒率先了拉开了本场大会的干货分享。
薛建儒教授认为任何人工智能技术最终都会以系统形式呈现。现有的智能系统可分为两大类:数字化智能系统与物理智能系统。数字化智能系统运行于数字空间,例如会下围棋的alphago、能解析蛋白质结构的alpha fold。物理智能系统运行于物理世界中,例如无人车、无人机、各类智能机器人等。自动驾驶是物理智能系统中的典型代表,也是是新一代人工智能发展战略规划重点突破方向。
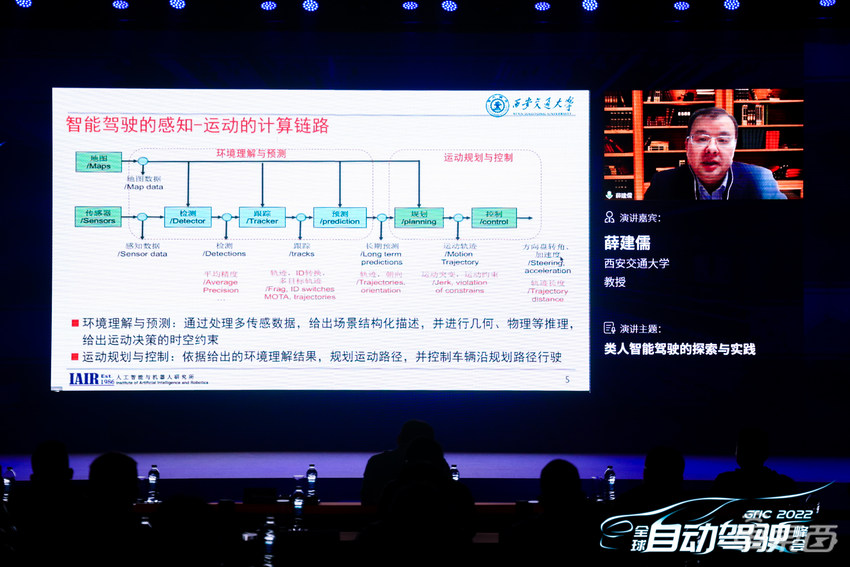
▲西安交通大学教授薛建儒
实现自动驾驶有两条技术路线:自主智能和协同智能,自主智能通过多传感融合的环境感知、鲁棒优化的运动规划和控制实现无人驾驶。协同智能则是通过引入人的作用、车与车、车与交通设施互联互通实现无人驾驶。自主智能与协同智能是实现自动驾驶的两种不同途径,但需要指出的是自主智能依然是自动驾驶核心。
一个典型的自动驾驶系统,输入地图和环境的感知,然后输出决策和执行,这种技术路线也已经得到了验证。
这一技术路线主要有两个关键点,一是环境的理解和预测,二是运动规划和控制。
具体来讲,交通场景的识别和理解主要分为两个层面,分别为定位导航和自主避障。在定位导航方面,传统的方式为全球卫星定位系统和地图配合来实现定位,而在自动驾驶领域,这样的定位能力无法满足高精定位的需求。
为此行业内推出了高精度地图技术,高精度地图也经过了三个阶段的发展,通过多传感器采集局部测量,局部测量时空对齐、逐层抽象,形成占据栅格地图。
在占据栅格地图的基础上,叠加上道路边界、车道、路口的情况等,形成一个更加更好高精度的混合地图。这样做的好处是,可以实现无卫星环境进行定位。
目前的配备了自动驾驶功能的智能汽车上都搭载了高精度地图,然而,对于高精度地图由于对环境空间的每个位置都需要存储信息,创建、存储与更新都代价昂贵。人类开车时并非时时刻刻依赖高精度地图,有经验的驾驶员大脑里存在一张经验地图,能否在自动驾驶上实现这张经验地图?大脑对环境的理解是以语义概念为基本单元的层次化组织,例如车辆、行人,交通标示等。语义矢量地图就是基于这样的思想的构建的。
目前薛教授的团队提出了单目视觉定位技术,通过与神经网络技术的结合,实现了视觉语义地图构建和定位技术,实现了厘米级定位精度。
对于动态场景的检测,薛教授认为,目前的检测方法识别率都到达了90%以上,但对于自动驾驶来说,还不够准确,目前行业内正在考虑检测、跟踪和预测的一体化技术,并结合引3D形状重建、语义分割等现有技术。
而在驾驶决策方面,主要分为行为决策、运动规划和运动控制。
在长期的自动驾驶研究中,薛教授团队认为可以借鉴人脑感知—运动回路的强容错、高能效、自学习等机制,研究受脑认知与神经科技启发的交通场景理解、情境预测和驾驶决策方法,使自动驾驶系统能够应对更多复杂的场景。
针对类人智能驾驶,薛教授团队正在进行交通情景长时间预测,为了实现这样方面的研究,薛教授团队进行了一个交通参与者行为预测的BLVD数据集,对轨迹、行为、意图进行收集。
通过视点自适应的行为识别,来识别视点的不同变化,确定了行为以后,可以对行人的运动轨迹进行预测,考虑行人之间的互相影响之后,可以得到一个更加准确的预测。
此外,还需要对事件进行一些预测,薛教授团队选择的是交通事故的分析,对交通事故进行分析和预测,判断驾驶员的注意力情况。
在驾驶决策中怎么引入类人驾驶策略呢?薛教授团队进行了模仿学习和强化学习相结合的方式,还进行了驾驶行为引导的模仿,引导生成一个最佳的驾驶行为轨迹。
薛教授认为,在自动驾驶领域,需要构建直觉性的认知计算框架,让系统无限的接近人脑,实现真正的无人驾驶。
二、量产自动驾驶火热发展 国产零部件替代潮兴起
在薛建儒教授对自动驾驶行业的发展作出期许之后,多个企业代表也介绍了其对于自动驾驶的最新思考和规划。
集度智能驾驶负责人王伟宝进行了名为《高效养成“三域融通”高阶智能驾驶》的主题演讲。王伟宝首先对智能汽车发展背景与现状进行了分析。

▲集度智能驾驶负责人王伟宝
在面向未来高阶智能化、高阶智能驾驶的状态下,集度对于未来的平台思考聚焦在平台化和安全这两个基本点。
在智能化平台方面,集度在架构、算力、传感器等设计上发力,希望能实现平台的自我成长和持续迭代能力,使平台可以从现阶段的辅助驾驶逐渐达到高阶的智能驾驶。
集度在整车方面应用了吉利SEA浩瀚架构、百度Apollo过去多年积累的智能驾驶和高精地图等等AI驱动的智能化能力,并自研了一套JET(Jidu Evolving Technology)平台,使智能核心能力和平台更好地连接,满足全车智能化的能力。
王伟宝在演讲中解读了集度高阶智能驾驶的安全理念。集度认为,对于高阶智能驾驶,需要从“设计安全、验证安全、感知安全”三个层面建立冗余安全体系。设计安全方面,算力冗余、传感器冗余、架构冗余都是非常重要的一环。
大规模的验证是非常重要的,集度全栈应用百度Apollo高阶自动驾驶全套能力和安全体系。Apollo在全国30多个城市有超过4000万公里的安全测试里程。
此外,用户对于安全的感知同样被集度视为安全的重要一环。因此集度在座舱内应用到了基于服务化SOA的理念,使得舱内可以实时和用户进行整体的交互。同时,车外也布置了很多视觉、语音整体的交互体验,让对安全的感知更加全面与完整。
小鹏汽车自动驾驶专家陈林则介绍了小鹏汽车在自动驾驶领域的发展策略和探索成果。

▲小鹏汽车自动驾驶专家陈林
他讲到,要在城市内实现导航辅助驾驶,比高速场景难了很多,小鹏团队用了1年多的时间才发布了城市NGP。用数据来说的话,相比高速NGP,城市NGP代码量提升了6倍,感知模型的数量增加了4倍,决策控制相关的代码量更是达到了惊人的88倍。
陈林讲到,量产智能辅助驾驶赛道目前已经结束了上半场的竞争,接下来会进入到了下半场阶段。
在上半场,小鹏汽车完成了三大拼图——发布了高速NGP和城市NGP,还有记忆泊车功能。
下半场小鹏的目标是实现XNGP,就是实现全场景的导航辅助驾驶功能,包括无高精地图区域的导航辅助驾驶+城市NGP+高速NGP+停车场导航辅助驾驶。
要实现XNGP,既需要硬件、软件上的支持,也需要有全闭环,自成长的AI和数据体系。
首先,XNGP需要全新的、以视频数据为主的感知模型。小鹏进而打造了名为XNet的感知模型。该模型不仅更好的动态物体感知能力,还能预测其他车辆的行驶轨迹,非常方便在城市内与其他车辆进行博弈。
其次,为了训练新的自动驾驶算法模型,小鹏也打造了一套优秀的全自动数据标注系统。
陈林讲到,要实现XNet的模型训练,需要对视频数据进行复杂标注,如果用人工的话需要2000人年的工作量,即1000人工作2年,费时又费力。
为此,小鹏专门打造了一套智能的数据标注系统,可以把2000人年的标注量,在16.7天内完成,效率提升了4.5万倍。
再次,数据标注完成之后,需要训练AI算法模型,对算力的要求非常之高。
如果用单机进行全精度训练,需要276天才能完成,即使优化后的单机训练也需要32天。好在小鹏跟阿里合作打造了一个名为扶摇的自动驾驶智算中心,仅需11小时就能搞定模型训练。
模型训练完成之后,小鹏会将其感知模型部署在车端的英伟达Orin-X芯片之上。这里也有难点,如果直接部署,XNet需要122%的Orin-X的算力,难以实现。所以小鹏团队重新写了Transformer,并进行了DLA优化,最终仅仅需要9%的算力即可部署动态XNet。
小鹏也构建了一个仿真系统。其自动驾驶算法每进行一次改动,都会在仿真测试系统里进行5000万公里测试,覆盖5000个核心模拟场景和17000个专项模拟场景,此后才会推送给用户。
元戎启行合伙人&副总裁刘念邱也带来了关于量产高级别自动驾驶的研究分享。

▲元戎启行合伙人&副总裁刘念邱
刘念邱表示,2022年高级别自动驾驶迎来了发展的机遇。那么高级别自动驾驶应该如何量产呢?
刘念邱表示,在前几年,自动驾驶的成本一直居高不下,一套方案的成本就能买一辆车。对车厂来说,这样的方案显然是不能量产的。
但对于元戎启行来说,元戎启行推出了量产后成本低于3000美金的L4级自动驾驶前装解决方案,打造出人人都能消费得起的L4级自动驾驶系统。而且元戎启行技术方案在感知算法、AI推理引擎、量产地图、决策和规划、数据闭环等方面具有显著优势,这样才是实现量产的最佳手段。
刘念邱表示,乘用车中采用的技术90%都可复用在自动驾驶轻卡上,因此选择在出行和同城货运两个方面进行落地。而量产的车辆即可卖给消费者,也能够用来提供Robotaxi出行服务。
此外,刘念邱还强调,要实现量产,单打独斗是走不远的,面对自动驾驶量产的工程难题,元戎启行与产业链的上下游、高校和科研机构都达成了良好的合作关系,逐渐建立了生态圈。
黑芝麻智能首席市场营销官杨宇欣则介绍了芯片对于自动驾驶行业发展的促进。他表示,中国市场的L2及以上自动驾驶渗透率领先全球,国内用户对于自动驾驶的接受度也更高,愿意为其支付,这为自动驾驶产业的崛起提供了绝佳的土壤。

▲黑芝麻智能首席市场营销官杨宇欣
杨宇欣认为,智能驾驶技术的不断演进,也对汽车芯片的格局带来了新的变化,传统MCU主要由海外企业供应,功能芯片SOC也是海外供应为主。而在当下自动驾驶要求下,车企对于行泊一体SOC的需求提升,国内企业在这方面已经处于领先地位。
行泊一体是一个复杂的系统,单芯片支持行泊一体功能,对芯片的性能、功能、集成度、功耗等等都有极高的要求。华山二号A1000是国内首款单芯片支持行泊一体域控制器的国产芯片平台。基于黑芝麻智能自研两大的车规级核心IP低功耗神经网络加速器NPU——DynamAI NN引擎及图像处理核心ISP——NeuralIQ ISP开发。同时,A1000已完成所有量产所需要的车规认证及软件配套。
在目前的自动驾驶领域,对于高性能车规芯片的需求非常高,黑芝麻智能也长期深耕于自动驾驶芯片领域。
华山二号A1000可以为L2+级自动驾驶提供帮助,华山二号A1000PRO直接面向L3级自动驾驶,华山二号A1000L则面向更广大的L2级自动驾驶市场。而A2000芯片,则可以提供多域融合的能力,为更高阶智能驾驶提供帮助。
目前黑芝麻已经掌握了完全自主可控的核心IP,通过这种方式构建自己的核心竞争力,在算法层面,黑芝麻也已经进行了全栈的自研。
黑芝麻智能除了向车企提供芯片,还提供了“瀚海”自动驾驶中间件、“山海”人工智能工具链,更好的帮助车企落地自动驾驶。
在具体解决方案层面,黑芝麻智能在乘用车方面提供了BEST Drive系列方案,可以覆盖L2~L3级辅助驾驶,也可以为用户提供中央计算SOC华山二号A2000。同时,为了满足日益增长的商用车需求,黑芝麻智能也推出了一套名为Patronus2.0的商用车主动安全系统。黑芝麻智能认为自动驾驶行业最终会走向车路协同领域,因此也在车路协同边缘计算方面进行发力。
目前黑芝麻已经获得了包括江淮、东风、吉咖在内的15+车企定点,已经开始了全面的量产,在今年还将会公布多个车企的合作项目。
如祺出行CTO宋德强在会上发表了题为《Robotaxi运营科技平台升级改造与数据变现》的主题演讲,从网约车产品架构、升级功能模块以及数据运营变现探索等方面出发对如祺出行Robotaxi运营科技平台和相关业务开展情况进行了介绍。

▲如祺出行CTO宋德强
如祺出行基于成熟的出行服务运营经验和对用户出行场景的深刻洞察,从乘客交互、交易平台、乘客营销、运力保障、安全监管等多维度对Robotaxi运营科技平台进行全面优化升级。
如祺出行开启Robotaxi混合运营服务后,用户通过同一入口即可同时呼叫有人驾驶车辆和自动驾驶车辆两种运力,不需要特地切换独立入口,打开如祺出行app首页的“打车”服务,如常输入上下车地点,由平台根据等候时长、距离等多维度最优原则智能匹配有人车或无人车提供服务,更符合日常出行需求。
同时,如祺出行还通过全量用户日常出行的真实热点场景和数据,联合自动驾驶公司持续优化上下车点密度,减少用户上下车的步行距离,逐步解决当前限制了Robotaxi商业化的上下车点密度不足这一难题,持续改善Robotaxi乘客线下体验。
宋德强还介绍了如祺出行通过有人驾驶网约车积累的成熟运营经验和海量数据优势,逐步完善Robotaxi运营科技体系的情况。
立足于自动驾驶车端、云端和数据三大模块相互配合的发展模式,如祺出行也在Robotaxi运营过程中,推进运营数据变现的相关探索:除了通过数据反哺自动驾驶技术优化迭代以外,也在进行高精地图数据众包、仿真场景库、驾驶员知识图谱等多维度探索,为后续广汽集团自动驾驶汽车量产和C端市场应用积累核心竞争力。
Nullmax纽劢创始人兼CEO徐雷分享了他在关于行泊一体的形态演变上的理解。

▲Nullmax纽劢创始人兼CEO徐雷
徐雷表示,中国ADAS市场空间非常巨大,整体渗透率也在显著提升,未来中国ADAS市场规模预计可超千亿元,增长空间巨大。
MaxDrive行泊一体方案,是Nullmax开发的一整套平台化的4.0形态的软件算法系统,实现了传感器深度复用,芯片资源共享,进一步降低了成本。
徐雷详细介绍了该系统的技术方案。如数据驱动方面,Nullmax自研了一套数据成长系统并自建、开源全球唯一特殊目标数据集,助力全球感知算法精进,解决业界缺少特殊目标数据的问题;感知算法方面,Nullmax提出了基于Transformer的3D车道线检测,提升了算法效果,并且实现了结构化场景里基于高精地图的语义定位等。
徐雷透露,Nullmax具备领先行业的技术优势,动态目标探测检测率>99.9%,车道检测率为96.12%,并提供了业内唯一能够在单TDA4上完成全栈自研的行泊一体4.0量产平台化方案、国内首个双TDA4独家定点周视方案,而且率先将BEV+Transformer神经网络运用至Orin平台实现基于局部实时构建地图的城市级自动驾驶。
探维科技CEO王世玮从激光雷达行业的发展历史入手,介绍了激光雷达产业发展面临的困难,以及探维科技的解决思路。

▲探维科技CEO王世玮
探维科技提出了硬件级图像前融合方案,通过在硬件层面实现摄像头和激光雷达的感知融合,来带领行业进入3.0时代,让激光雷达在量产自动驾驶上发挥更大的作用。
基于该方案,探维科技推出了名为Fusion的激光传感器,通过将摄像头的CMOS传感器引入到激光雷达内部,可以非常方便的实现图像和激光雷达的时间、空间同步问题,并且打包输出多维融合信息数据。
其空间同步可以实现3cm的同步精度(100米距离),时间同步精度则在微秒级。
除了Fusion,探维科技很早就在提供量产的固态激光雷达产品。提出了基于阵列化收发芯片和线光束扫描的ALS解决方案,并以此打造出了Tempo和Duetto两款车规级固态激光雷达产品,实现了成本、性能和稳定的统一。尤其是Duetto,量产后其成本有望在业内率先降低至千元级的水平。
产品之外,探维科技也在苏州打造了车规级生产线,占地超过3000平米,具备大规模量产能力。王世玮透露,探维科技目前已经拿下了3个量产车定点项目。
三、数据驱动成主流 重视觉方案开始兴起
目前在自动驾驶领域,大家都在追求量产自动驾驶的落地情况,多个企业也都在这个方向发力。
长城沙龙智能化中心负责人杨继峰介绍了数据驱动是如何帮助高级别自动驾驶实现量产落地的。

▲长城沙龙智能化中心负责人杨继峰
在2022年,行业内完成了很多技术共识,比如基于多模态+大模型+BEV的新一代感知架构;比如在高精地图从一个零部件真正成为解决方案深度耦合的部分(包括经验\知识图层的表达和应用),比如基本形成了数据闭环的软件架构、影子模式的链路,以及超算平台的基础设施等。
杨继峰认为我们都在表达数据驱动的意义,但其实是不同维度的表达,比如算法层面对监督学习、非监督学习以及深度强化学习的应用;比如软件层面数据驱动的感知、融合、规划、地图等模块;比如功能层面的更少的基于TTC等参数约束,更少的what if,更多的拟人化场景;比如硬件层面从逻辑计算算力到AI算力的追求;比如交付层面在技术栈设计上就应基于海量数据回流而非大量一次性人工开发标定。
杨继峰认为,自动驾驶产品的追求应该是系统的安全性、场景的可用性和体验的智能性,并对于定义产品还是定义技术栈的区别表达了观点。他认为一部分车型应该坚持感知的完整性和均布,算力的领先,针对L3以上的系统架构的安全性,追求对于更新的模型兼容,在这一代平台上进行更长时间的持续高效开发和交付,也就是追求平台能力。但也会有一部分车型在2023年用更偏功能型一点的覆盖高速高架+城市高频简单场景+好用的记忆泊车的中算力解决方案更具性价比,也就是追求集成功能实现的能力。
对于自动驾驶的愿景来说,需要实现与驾驶员关联的体验闭环、与局部和全局交通关联的场景闭环和AD as Service的运营闭环,但杨继峰也认为目前的自动驾驶行业还远未在产品设计和软件层面全部实现,而这一代高阶智能驾驶的量产将是这些实践的重要开始,并在这一代车型的生命周期内与用户形成闭环。
针对未来自动驾驶,杨继峰认为自动驾驶将会从功能驱动到场景驱动,从开发闭环到体验闭环。而对数据驱动,杨继峰认为当前的数据驱动聚焦在算法软件层面,数据驱动的算法应用于感知、预测、规划等模块并逐步深化,数据驱动的pipeline在车端和云端形成完整的研发架构和基础设施架构;下一步的数据驱动会进入到产品设计和场景设计层面,从推理和定义场景,到基于对于数据的理解甚至数据空间的分布去构建场景,从寻求更合理的场景划分,到寻求更优的数据分布和表征。从远期的愿景看,数据驱动也可能不止是自动驾驶自己的事情,最终会成为企业数字化的一部分,深度与VIMS、车联网数据、行驶数据、用户数据等领域耦合,以一元化的形式进行挖掘、处理、存储、应用、以及构建赋能多个研发团队的企业级的AI基础。
领骏科技CEO杨文利介绍了对自动驾驶行业发展态势的判断,同时着重介绍了领骏科技在决策算法和数据闭环方面的亮点。

▲领骏科技CEO杨文利
杨文利讲到,自动驾驶的架构分为感知、决策、执行三大块。
目前的感知技术路线比较成熟,但在决策规划方向还是一个八仙过海的状态,对高等级自动驾驶来说,决策规划的重要性非常之高,可以说是核心模块。
决策方面业内有两种技术路径,一种是基于规则的算法,还有一种基于深度学习的算法。
基于规则的算法具备逻辑清晰、结果可追溯等优点,但缺点是无法持续迭代,上限不高。基于学习的算法能够持续迭代,但安全性难以论证。
为了取长补短,领骏科技提出了混合架构决策算法,实现了两种方法的优势互补。
具体来说,就是先用深度学习的方法学习人类司机应对各种特殊情况的处理办法,然后再用规则(比如不能压实线或者闯红灯)来保证AI算法给出的驾驶决策是安全且符合规则的。
领骏科技在数据闭环方面也进行了创新,通过数据反刍等方法,提高了数据闭环的增益效果。
比如在场景数据方面,通过将现有场景库进行数据拆分,然后进行重新组合,就能派生出新的场景数据,进而用少量数据就能实现相当于大量数据的学习效果。
高等级自动驾驶落地方面,领骏科技聚焦智能网联公交和城市支线物流两大场景,目前已经完成标准化整车前装产品,且已经在国内多个城市实现落地部署。
领骏科技也在进军量产自动驾驶市场,定位于Tier2供应商,面向L2+和L3级自动驾驶,为Tier1企业提供决策规划软件系统或者是控制器套件。
杨文利在现场透露,领骏科技预计在今年一季度推出无需高精地图的高速公路领航辅助驾驶方案和产品,三季度推出无需高精地图的城市道路领航辅助驾驶方案和产品。
鉴智机器人合伙人刘竞秀则介绍了以视觉3D理解为核心的自动驾驶系统。

▲鉴智机器人合伙人刘竞秀
鉴智机器人的核心创始团队分别来自百度、地平线和深鉴科技,在算法和芯片领域都具备很强技术能力和经验。
鉴智机器人的技术路线主要有两个要点,一是3D理解,二是单车智能。其推出的双目摄像头分辨率分别为200万像素和800万像素,水平视场角可以覆盖60度、100度和120度,帧率达到了30FPS,能够支持RGB+Depth的同步输出。
针对这款产品,鉴智机器人自研了一套感知算法,至于算力平台,则可以根据车企的要求自由选择。
而在算法层面,鉴智机器人从第一性原理出发,基于BEV学习的特征级前融合进行感知,更具灵活性和扩展性。同时鉴智机器人还通过BEVDet高计算模块的算法优化,实现了性能的明显提升。
鉴智机器人还基于单颗地平线征程5实现了L2++方案,也是首家达成这一成就的企业。
目前鉴智机器人已经获得了7个车型的定点认证,产品包括L2 ADAS辅助驾驶方案、双目立体视觉产品和L2++高阶智驾方案。
四、供应链领域出现变革 车规级芯片持续突破
随着自动驾驶行业的发展,自动驾驶的产业链也在快速发生变化。
安谋科技智能物联及汽车业务线负责人赵永超分享了高性能融合计算IP平台对车规级芯片的重要价值。

▲安谋科技智能物联及汽车业务线负责人赵永超
赵永超详细介绍了Arm IP在汽车的各组成部分的广泛运用。
其中, 安谋科技自研的“周易”NPU,能够赋能更高算力AI计算。“周易”NPU提供人工智能算力弹性配置,算力可达320TOPS,灵活的人工智能算法调度和分配,能够支持人工智能算子客户化定制和hardware partition(硬件隔离)。
自研“星辰”STAR-MC2处理器全方位升级性能、规格。“星辰”STAR-MC2将CMSIS-DSP算力提升200%以上,纯量算力提升45%以上,并增加ACI,RAS,UDE等多个Armv8.1-M架构功能,内置Trust Zone,还符合车载芯片功能安全设计规范。
“玲珑”助力车载计算机视觉体验。自研“玲珑”ISP能够为自动驾驶所需的数据感知提供保证,配合“玲珑”VPU的多重高清视频编解码器,支持高达2.4Gpix/s的高性能图像处理能力,4:1多帧曝光,高达140zdb+宽动态高画质图像呈现,具有灵活的系统拓展性,符合车载功能安全设计规范。
此外,赵永超介绍了安谋科技取得的成绩。自1996年Arm进入汽车半导体领域以来,有15家一线汽车电子芯片开发商采用Arm技术方案,在智能座舱和智能驾驶等高算力汽车芯片领域占有率超过65%。目前全球客户的数量超过600家,中国授权客户达到300+,出货量达到2300亿。
后摩智能联合创始人、产品副总裁信晓旭发表了题为《以计算架构质变,迎汽车芯片智变》的主题演讲。

▲后摩智能联合创始人、产品副总裁信晓旭
信晓旭分享了他与行业伙伴对于智能汽车行业发展现状达成的共识,他们认为未来智能驾驶芯片的关键需求在于大算力、低功耗、低成本和高可靠四个方面。
大算力有两个维度,一是有效算力的增加,把算力带到提升用户体验;二是算力要相对通用,支持算法的演进。信晓旭举例说,BEV目前已经成为主流,但不是算法的重点,未来会有更先进的算法出现,支撑用户的自动驾驶体验。
低功耗主要关注降低散热成本和增加系统可靠性两方面,如果功耗过大,就会存在散热成本过高和可靠性减低等问题。
在对低成本的解读中,信晓旭认为低成本不仅是芯片自身成本的降低,还要看是否降低了系统的整体成本。最后是高可靠性方面,既要满足功能安全,数据处理方面也要保证极低延时。
信晓旭认为在数据中心领域,一些发展较早的同行已经在架构创新领域做出了深入的探索,智能驾驶芯片领域也需要通过架构创新的方式应对全新的领域和解决全新的需求,因此需要对发展架构做出新的探索与选择。
信晓旭说,不同于传统的冯诺伊曼架构,后摩智能基于存算一体的创新架构,研发出了大算力、低功耗、低延时的高能效比芯片。尤其是在当前地缘政治因素的影响下,存算一体创新架构为供应链安全提供了新的可能。
小马智行硬件及嵌入式软件研发总监陈然发表了以《从自动驾驶硬件系统研发到域控制器量产》为题的主题演讲,介绍了小马智行自动驾驶硬件系统研发的趋势和理念,以及第六代自动驾驶软硬件系统和首款自研的量产级域控制器。

▲小马智行硬件及嵌入式软件研发总监陈然
陈然分享了小马智行的核心产品,小马智行在2018年重磅发布了第三代软硬件集成的自动驾驶系统 PonyAlpha,证明了自动驾驶系统的通用性与可移植能力。这也使得小马智行成为了中国首支运营产品化无人车队的自动驾驶公司。
此后,自动驾驶系统 PonyAlpha不断发展,与2021年初,第五代PonyAlpha X 从标准化产线批量下线,小马智行向批量化标准化生产迈出的坚实的一步,也开始了对于未来走向前装量产的大胆尝试和探索,开启了Pony对自动驾驶技术的规模化进程。
据陈然透露,小马智行第六代自动驾驶软硬件系统将会首先搭载在丰田赛那Autono-MaaS车型。该自动驾驶系统从造型设计、零部件研发选型、安全冗余及系统装配生产等方面,均瞄准车规级量产。目前,整车设计方面也较传统乘用车和自动驾驶汽车进行了一些修改,降低自动驾驶感知系统与整车适配的难度,为融入前装量产做好准备。
技术和产品的不断发展积累促使小马智行在2022年推出了首款量产级自动驾驶域控制器,陈然介绍到,单Drive Orin和双Drive Orin就是小马智行基于Orin处理器打造的车规级量产域控制器,算力分别为254TOPS和508TOPS,这两款域控制器已经于去年四季度量产。
陈然展示了这款域控制器在接口、性能及安全性上的参数。这款ADC具备强大的算力和数据通信能力,配备完善的功能安全和网络安全机制,符合严格的车规级测试标准。
该款域控制器也已通过多种实际的测试场景,能够很好地支持车辆实现多种智能驾驶功能。
小马智行是业内首批基于一个或多个NVIDIA DRIVE Orin及车规级NVIDIA Ampere架构GPU 设计出不同域控制器产品组合的自动驾驶技术公司,这款域控制器也为L4级自动驾驶硬件系统研发拼上一块重要的版图。
映驰科技自2018年成立以来,是国内主要的汽车基础软件和中间件供应商,已经和多个供应商、车企建立了合作关系。EMOS中间件产品也获得了功能安全ASIL-D的产品认证。在今天的活动上,映驰科技产品副总裁赵健洪介绍了其开发的智能驾驶中间件。

▲映驰科技产品副总裁赵健洪
他认为自动驾驶软件平台在数据、功能算法、平台、安全安防、工具等方面都面临着挑战,此外还面临着中间件方面的问题。
目前映驰科技开发了智能驾驶域开放解决方案,和多个芯片企业建立了合作,如地平线,恩智浦,芯驰科技等企业。
在接口方面,可以支持12路800万摄像头的介入,还可以接入4D雷达、激光雷达、超声波雷达等,可以接入10路以太网络。在功能安全和信息安全方面也做了很多设计。
映驰科技还可以提供非常成熟的基础软件和中间件平台和完善的工具链来帮助车企和系统供应商更好的落地自动驾驶。
由于目前自动驾驶的方案比较多,映驰科技也针对不同的客户提供了灵活的配置设计,支持多种芯片方案,给顾客提供良好的服务。
映驰科技是一家软件产品公司,为客户的快速交付提供硬件和软件开发平台,协助客户交付系统硬件产品。平台软件的核心部分将会向客户提供EMOS的中间件,具备确定性调度与通信服务、系统服务、自动驾驶服务等。
除了提供软件组件之外,映驰科技还会提供一套名为EMOS Studio的IDE软件工具,方便用户更好的开发,集成,编译,仿真,测试。
赵建洪表示,映驰科技的EMOS最大的特点在于确定性调度和通信,可以降低时延,此外还能够保证智能驾驶的高性能、高可靠性并兼容部署集成的灵活性、高效性。
五、L4级落地加速 细分赛道玩家各显神通
在目前的L4级自动驾驶领域,多个细分赛道如无人矿车、无人环卫等领域的玩家也都在快速发力。
文远知行深圳研发中心总经理董方亮发表了题为《多场景落地构建自动驾驶护城河》的主题演讲。

▲文远知行深圳研发中心总经理董方亮
文远知行的自动驾驶产品都依托着WeRide One这一自动驾驶通用技术平台,该平台由多模块硬件、自动驾驶软件算法、云端平台组成,在支持多产品落地方面发挥了重要作用。
董方亮举例,同城货运、共享出行、随需公交和智慧环卫在应用时,最重要的就是满足了全天时、全场景和全天候的落地。
文远知行还与博世达成了深度合作。博世提供卓越的供应链管理及质量控制体系、严格的工程设计、测试及验证机制和最为广泛的OEM客户群体等,与文远知行共同打造高阶智能驾驶。这意味着以后几年文远知行将陆续为用户带去更好的用车体验。
此外文远知行还在很多方面与同行业企业展开了战略合作。2021年11月,文远知行与广汽集团、如祺出行开展战略合作,三方进入Robotaxi规模化测试,2022年在如祺出行平台上,向公众提供了Robotaxi服务。
2020年6月,通过与高德开展合作,文远知行Robotaxi上线高德打车平台,在中国实现首例由聚合打车平台与自动驾驶企业联合推出的全对外开放Robotaxi服务。
文远知行还提供了中国首个开放运营的无人小巴服务。2022年1月,文远知行正式在广州国际生物岛开放运营全无人驾驶的文远小巴,为市民提供无人驾驶微循环公交服务。
此外,文远知行还展开了南沙规模最大的全无人驾驶环卫车车队测试。2022年4月28日,文远知行推出中国首款前装量产全无人驾驶环卫车,5月起在广州南沙区全区域开展公开道路测试,首批车队规模超50台,全天化运营的无人环卫车有自动喷水洒扫等功能,获得了市场的青睐与好评。
盟识科技联合创始人&CTO顾嘉俊就盟识科技的无人驾驶技术在生产物流场景中的应用进行了分享。

▲盟识科技联合创始人&CTO顾嘉俊
顾嘉俊表示,近年来,自动化、数字化推动了制造、生产等各行业变革,这一变革也逐渐渗透至物流行业。
那么如何让生产物流机器更智能?
顾嘉俊认为要从打造自动驾驶方案要从车辆适应性、环境适应性、工况适应性入手。
在车辆适应性方面,自动驾驶方案要考虑车型种类、作业装备、驱动形式,使该方案加快对不同车型的适应。在环境适应性方面,要考虑场景差异、场景变化、作业工艺、协同交互等不同场景。此外,工况上的差异也是不可忽略的,要注意运行模式、载荷变化、轮地接触、设备故障,并进行实时运行监测。
基于以上限制条件,顾嘉俊以矿区智能运输系统架构为例,介绍了盟识科技采用的车端自动驾驶系统(VCS)和现场运营系统(FOS)。
车端自动驾驶系统(VCS)通过车辆配置的传感器与控制器,进行驾驶模式管理、任务规划执行、状态分析诊断,实现车辆自动驾驶功能;而现场运营系统(FOS)通过数据信息管理、任务时序规划、生产系统对接,实现作业车辆的最优统筹调度。
顾嘉俊也介绍了盟识科技在生产物流场景自驾方案优化上的亮点:通过多源数据融合处理,保障安全运行;通过实时智能决策,应对场景变化、通过实时鲁棒控制,应对环境扰动。此外,盟识科技也格外注重FOS调度系统结构层级、定制协同卸料工作流程、故障监测与诊断。
于万智驾联合创始人&CEO刘煜发表了题为《无人环卫车打破高等级自动驾驶落地障碍》的主题演讲。

▲于万智驾联合创始人&CEO刘煜
目前城市环卫工作面临着多种困境,环卫工人成本高、人力短缺等痛点凸显,环卫无人驾驶化需求日益迫切。
由此,于万智驾自创了创新型环卫作业模式,致力于引领环卫工作迈向智能化、无人化运营时代。
据刘煜介绍,从传统环卫作业模式转变到云控平台控制+自动驾驶车队与环卫工人协同作业的2.0环卫模式,不仅综合作业效率可以提高30%,成本也将节省30%以上,一辆无人驾驶新能源车还将减少200吨碳排放,达成综合的良好效益。
而当进入环卫3.0智能化、无人化全覆盖的时代后,在未来,环卫将会不再是人的工作,而是人操纵着机器的工作,环卫工人不再是在大街上工作,而是在操纵室里工作。
于万智驾推出了环卫一体化解决方案,自主研发了智慧环卫平台为环卫运营管理赋能数字化和智能化,通过算法管人、算法管车、算法管物和智能云控,更好地解决了环卫工作实际完成中会遇到的问题。
此外于万智驾还研发了自己的自主研发底盘和整车,刘煜解释道,自研扫路机拥有更高的性价比、更加可控的质量,而且专门为无人环卫而制造,清扫能力强,作业能力超过同吨位扫路机性能80%。
结语:自动驾驶加速落地
过去两年时间内,自动驾驶已经成为行业内最火热的话题了,无论是车企还是自动驾驶方案供应商都在快速布局,量产成为行业内的共同追求。
在这个过程中,车企开始逐步推广L2+级自动驾驶,在高速和城市均推出了领航辅助驾驶,另一方面,L4级自动驾驶企业也开始在L2级自动驾驶方面发力,都在为量产而努力。
自动驾驶落地潮的兴起,也带动了一部分供应链企业的快速发展,国产芯片和激光雷达企业也开始快速量产,逐步实现国产化替代。
综合这些方面来看,汽车产业的自动化已经成为了不可阻挡的潮流,加速落地将会成为下一阶段的最大主题。