车东西(公众号:chedongxi)
作者 | 赵婧初
编辑 | 志豪
车东西7月1日消息,日前,华为公司高级副总裁、引望公司CEO靳玉志在东风猛士全新车型发布会上公开表示,希望能够在中国真实复杂道路环境下,与特斯拉FSD开展一次全场景公开对标。
与此同时,靳玉志再次强调,华为将坚持走融合感知的技术路线,不会转向纯视觉的技术方案。

▲华为公司高级副总裁、引望公司CEO靳玉志
作为全球辅助驾驶领域颇具代表性的两套方案,华为乾崑辅助驾驶(ADS)与特斯拉智能辅助驾驶(FSD)一直被外界反复比较。
随着特斯拉FSD逐步进入中国市场,双方之间的竞争,也开始进入新的阶段。
一、华为欢迎良性竞争 坚持融合感知技术路线
靳玉志在现场主动透露了一段行业往事,一年多前,在相关主管部门调研特斯拉FSD能不能合规进入中国市场时,他曾明确表态支持相关流程尽快推进,也欢迎海外成熟的辅助驾驶技术进入中国市场参与良性竞争,他表示很有信心进行比拼。
从商业竞争来看,华为选择公开对标特斯拉FSD不难理解。
虽然国内有众多家辅助驾驶厂商,但放眼全球,特斯拉FSD依然是智能辅助驾驶领域最具影响力的产品之一,也是消费者最熟悉的高阶辅助驾驶系统之一。
对于任何一家希望证明自身技术实力的企业而言,与特斯拉FSD进行公开比较,也是展示自家产品能力的一种方式。

▲特斯拉智能辅助驾驶FSD(图源网络)
另一方面,国内厂商一直围绕芯片算力、传感器数量、覆盖城市数量、接管次数等技术参数展开竞争,但这些参数对于普通消费者来说并不直观。华为选择与特斯拉FSD公开对标,让竞争焦点从技术参数进一步转向真实道路环境中的驾驶表现,最终回归到消费者最关心的问题,即谁开得更好、谁的驾驶体验更接近真实人类驾驶。
与此同时,随着特斯拉FSD逐渐进入中国市场,关于以华为ADS为代表的融合感知技术路线与以特斯拉FSD为代表的纯视觉技术路线,两条智能辅助驾驶路线之争越来越激烈。
靳玉志在现场就这一话题明确了华为的技术立场,他表示,华为从始至终都会坚持走融合感知的技术路线,不会转向纯视觉的技术方案,多年的全场景路况验证已经证明这条路线的可靠性和普适性足够高。

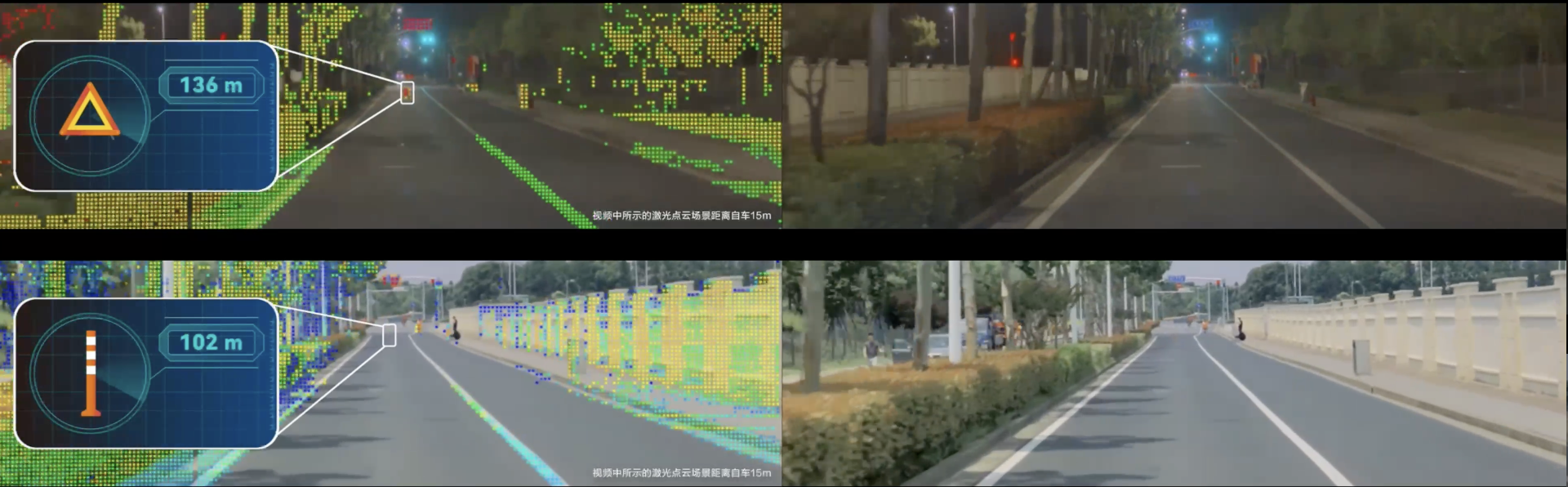
▲华为乾崑融合感知方案
二、特斯拉FSD在华训练数据不足 对标结果难代表最终水平
也许会有人想问,如果真的在中国公开测试,特斯拉FSD一定会输吗?
答案并没有那么简单。
首先,公开测试的结果高度依赖测试规则。
在发布会现场,靳玉志坦言,目前华为暂时没有办法把辅助驾驶方案落地到美国市场,因此更希望能在国内的真实复杂路况环境里,和特斯拉FSD做一次全场景的公开对标比拼,用实际落地表现分出高下。
以密度高、参与者多、动态变化快著称的中国城市道路,包括了大量非机动车、人车混行、临时施工以及复杂路口等本土长尾场景。长期围绕中国道路进行研发和迭代的华为ADS,在本土复杂道路场景积累了更丰富的经验。
▲中国城市道路状况
其次,目前特斯拉FSD在中国仍处于调整适配阶段。
由于训练数据来源、法规要求等因素,国内版FSD与美版FSD仍存在一定差异。FSD入华短期实测表现不如国产方案,根本原因或许不是技术不行,而是其在华训练数据不够。这是时间问题,不是能力问题。
这也意味着,当前阶段直接比较华为ADS与特斯拉FSD的能力,很难完全代表各自技术路线的最终水平。
更重要的是,辅助驾驶能力本身就是持续演进的过程。
不同的软件版本、不同天气、不同交通流以及不同测试路线,都可能影响最终结果。
因此,当下进行公开测试获得的结果可以提供参考,但难成为评价二者整体辅助驾驶能力的唯一标准。
三、辅助驾驶普及率超出预期 辅助驾驶已成购车“必选项”
在今年4月的2026智能电动汽车发展高层论坛上,靳玉志表示,2025年中国10万元以上新能源车型的L2级辅助驾驶渗透率已超90%,2026年有望成为全球自动驾驶元年。

▲靳玉志在2026智能电动汽车发展高层论坛上发言
当前国内50万元以上高端乘用车市场中,已经有超九成的车型直接标配了可覆盖全场景的城区高阶NCA辅助驾驶系统,落地普及速度超出行业此前的预期。
与此同时,靳玉志观察到,消费者对辅助驾驶的接受度已发生质变,辅助驾驶功能已从之前购车时的”加分项”变成了现在的“必选项”。
基于这种爆发式的增长趋势和消费者认知变化,靳玉志做出判断,2026年或将是全球辅助驾驶产业正式大规模落地的真正元年。
结语:技术路线之争终将回归体验本源
随着特斯拉FSD入华,它和华为ADS这两套具有代表性的智能辅助驾驶方案开始进入同一竞争环境。
无论是特斯拉坚持的纯视觉路线,还是华为采用的融合感知方案,双方都在持续推进端到端、大模型等AI技术在辅助驾驶领域的应用,二者只是在感知方案上选择不同,最终影响二者市场竞争力的,仍然是车辆在真实道路环境中的安全性、稳定性和用户体验。
如果未来能够在统一规则下开展公开、透明、可复现的能力测试,或将有助于消费者更加客观地了解不同技术方案在真实道路环境中的实际表现。