车东西(公众号:chedongxi)
作者 | Janson
编辑 | 志豪
不只是芯片,英伟达带来自动驾驶全套技术栈!
车东西3月18日消息,GTC 2026开幕后,英伟达发布了多项自动驾驶新技术,把L4自动驾驶所需的计算平台、安全架构、开源模型和仿真工具,整合成一套标准化底座,推向更多车企和出行平台。
从英伟达的整体布局来看,其底座的中心依旧是DRIVE Hyperion没有变,围绕这套平台,英伟达此次又补上了几块关键拼图。
Halos OS作为面向AI驱动车辆的统一安全架构,为DRIVE Hyperion提供量产级安全底座。
Alpamayo 1.5作为新一代开放推理模型,进一步强化车辆在复杂场景中的决策与约束能力。
Omniverse NuRec则面向真实世界数据重建与高保真交互式仿真,继续完善从训练、验证到部署的闭环。
与此同时,英伟达的自动驾驶朋友圈也进一步扩大,比亚迪、吉利、五十铃和日产正在基于DRIVE Hyperion推进L4项目,Uber也将基于这一平台在2027年率先于洛杉矶和旧金山启动新一轮 Robotaxi部署,并计划到2028年扩展至28个城市。
如果说过去外界更多把英伟达看作车端算力芯片和仿真工具提供者,那么在GTC 2026上,英伟达想强调的故事已经很明确,它希望成为自动驾驶进入规模化落地阶段后的底层平台提供者。
一、采用端到端+传统规则 吴新宙解构英伟达自动驾驶技术
在本次GTC中,黄仁勋的主题演讲主要放在了AI上,汽车业务的进展则是和物理AI一同进行了一个相对宏观的发布。
作为英伟达汽车副总裁,吴新宙对于此次技术落地的内容讲的则比较细致,从技术宏观进展,再到具体技术栈的实施都有所覆盖。

▲英伟达汽车副总裁 吴新宙
吴新宙在演讲中首先给出了自己对于自动驾驶领域的宏观研判——自动驾驶已经在2025年迎来“ChatGPT时刻”。
他认为,过去一年里VLA模型、多模态基础模型和推理模型的突破,正在改变自动驾驶的研发方式。
但他也指出,全球每年约13万亿英里的交通出行里程中,真正由自动驾驶完成的比例只有0.006%,因此自动驾驶的行业天花板远未触及。
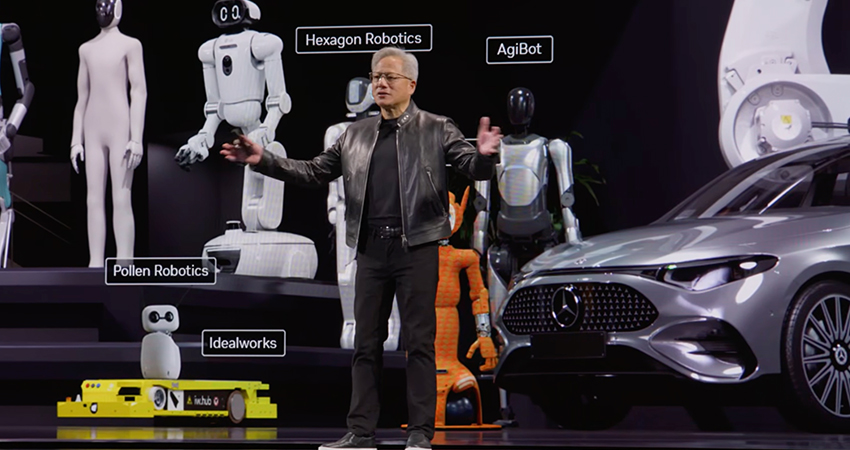
而在具体的业务落地上,吴新宙并没有把英伟达首个量产的L2辅助驾驶所采用的路线描述成“纯端到端”。
英伟达更强调的是端到端模型与传统安全栈并行,也就是在推理式模型提升能力上限的同时,保留可验证、可认证的安全护栏体系。
▲英伟达自动驾驶技术栈
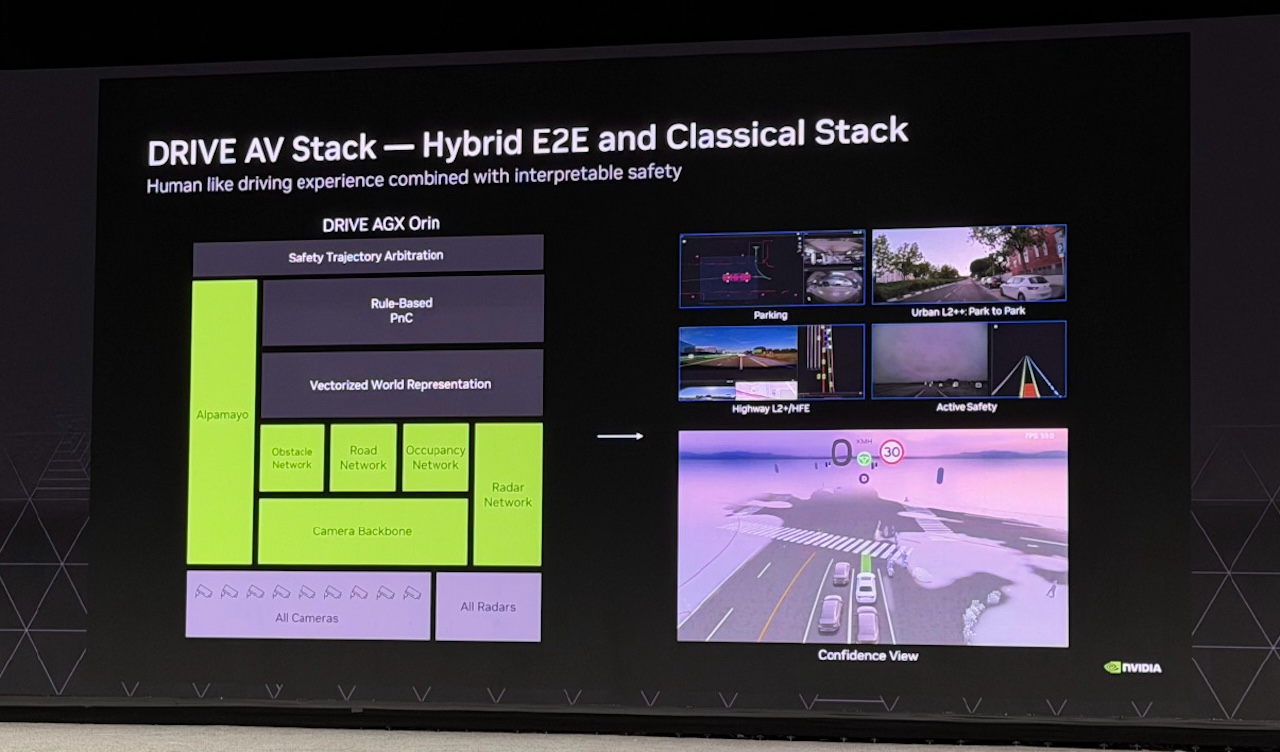
针对自动驾驶的演进路线,吴新宙还给出了一条相对清晰的推进时间表。
英伟达在2025年推出L2++,到了2026年推进点到点辅助驾驶,2027年部署L4自动驾驶,2028年之后再面向普通用户交付L4能力。
▲英伟达自动驾驶推进时间表
二、模型+仿真 英伟达再次升级平台能力
吴新宙讲解的自动驾驶技术栈更多的还是基于奔驰和英伟达合作,落地在奔驰CLA车型上的L2级辅助驾驶。
针对不同车企和更高阶自动驾驶的需求,英伟达进一步升级“模型”和“仿真”的水平,并将其整合为平台能力。
英伟达最新的Alpamayo 1.5已经可以理解导航路径,并通过自然语言或指令约束实现变道、靠边停车等更可控的行为,同时输出带有推理轨迹的驾驶轨迹结果。
相比于此前英伟达发布的Alpamayo 1,在提升了端到端大模型“可解释”性的基础上,还能一定程度上追问“为什么这么做”,并通过文本和导航提示去约束行为。
▲Alpamayo 1.5模型能力
英伟达还表示,自今年早些时候推出以来,Alpamayo相关模型已被全球超过10万名汽车开发者下载,而Alpamayo 1.5版本增加了多摄像头支持和可配置相机参数,让同一套AI驾驶栈更容易复用到不同车型和不同传感器配置上。
和模型一起推进的,是仿真环节。
自动驾驶训练也不再只依赖真实道路数据,而是越来越多地引入合成数据与仿真数据,这背后对应的正是Cosmos等世界模型和仿真工具链的价值。
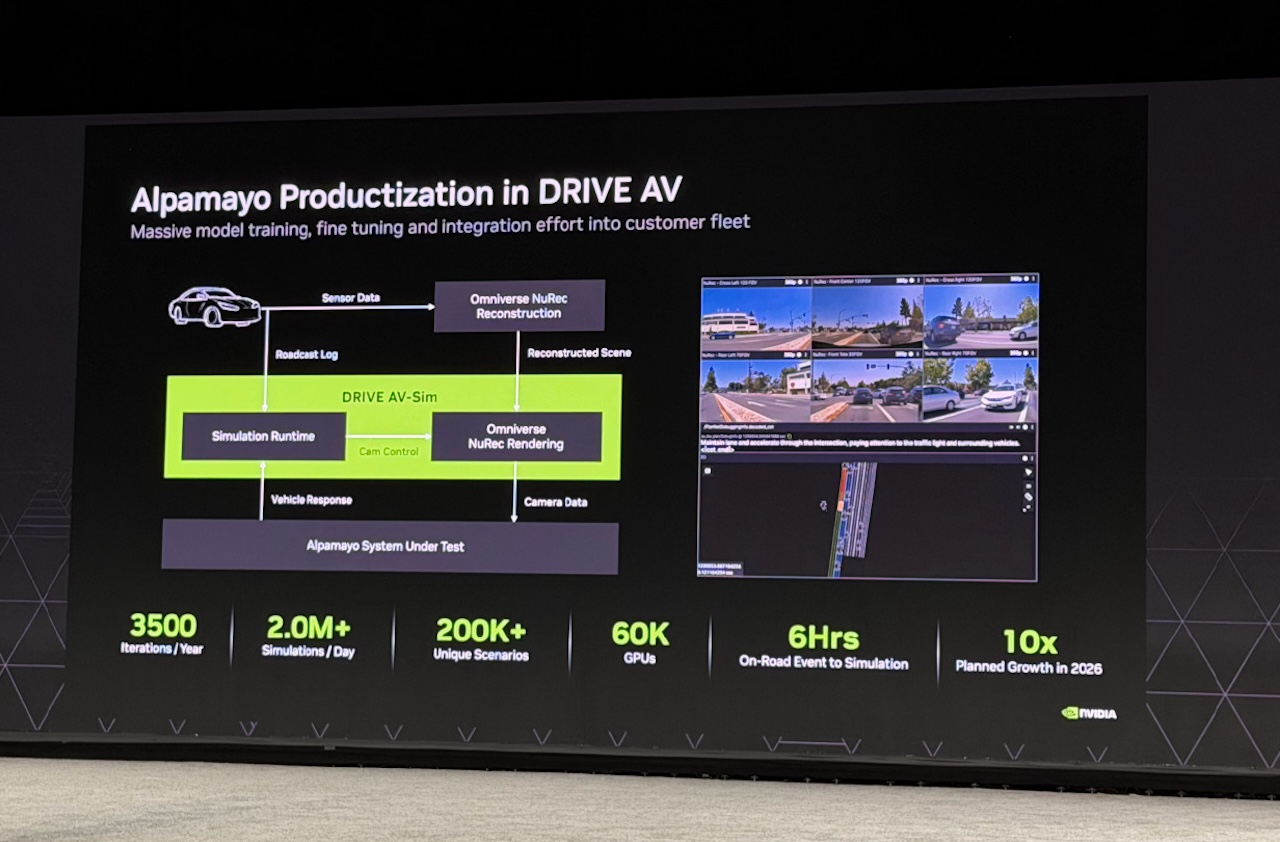
日前,英伟达宣布Omniverse NuRec正式可用,这是一套基于3D Gaussian Splatting的重建与渲染技术,可以从真实世界数据中重建可交互仿真场景,用来测试推理式自动驾驶系统在复杂边缘场景中的表现。
▲Omniverse NuRec在开源平台
对自动驾驶公司而言,这类工具的意义不只是“把仿真做得更真”,而是用更低的手工建模成本,把真实路测中的长尾场景更快搬回开发体系中。
官方表示,已经有51WORLD、dSPACE、Foretellix等工具链企业完成集成,密歇根大学Mcity也在用NuRec搭建测试场地的数字孪生。
可以说,英伟达实际上是在把自动驾驶的竞争,从过去更偏“感知栈/算法栈”的局部竞争,往“模型+数据+仿真+安全”的系统工程竞争上继续推。
值得一提的是,英伟达宣布正与亚马逊合作,把Alexa Custom Assistant与NVIDIA DRIVE AGX上的多模态边缘AI能力结合起来,让车企在本地计算和隐私条款约束下,在端侧提供更强的车内环境感知与交互能力。
三、L4平台成型 多个明星车企加盟
有了明确的时间表,建立了全套自动驾驶技术栈之后,自动驾驶具体的业务落地还是需要合作伙伴的支持。
根据此次GTC披露的信息,英伟达高阶辅助驾驶的合作伙伴也进一步扩充,比亚迪、吉利、现代起亚、日产和五十铃等车企或出行相关伙伴,正在基于DRIVE Hyperion推进L4-ready车辆项目。
其中,日产的方案明确搭配Wayve软件,五十铃则与TIER IV合作开发L4自动驾驶巴士。
现代和起亚的合作则基于NVIDIA DRIVE Hyperion自动驾驶开发平台共同推进下一代自动驾驶技术研发。

▲DRIVE Hyperion L4概念图
现代汽车集团计划在部分车型中集成英伟达自动驾驶技术。
此外,英伟达还将探索与现代汽车集团旗下自动驾驶合资企业Motional深化合作,提升L4级Robotaxi的能力。
与此同时,Uber与英伟达扩大合作,计划到2028年在4大洲28个市场部署基于NVIDIA DRIVE全栈软件的自动驾驶车队,首批城市是洛杉矶和旧金山湾区,时间点定在2027年上半年。
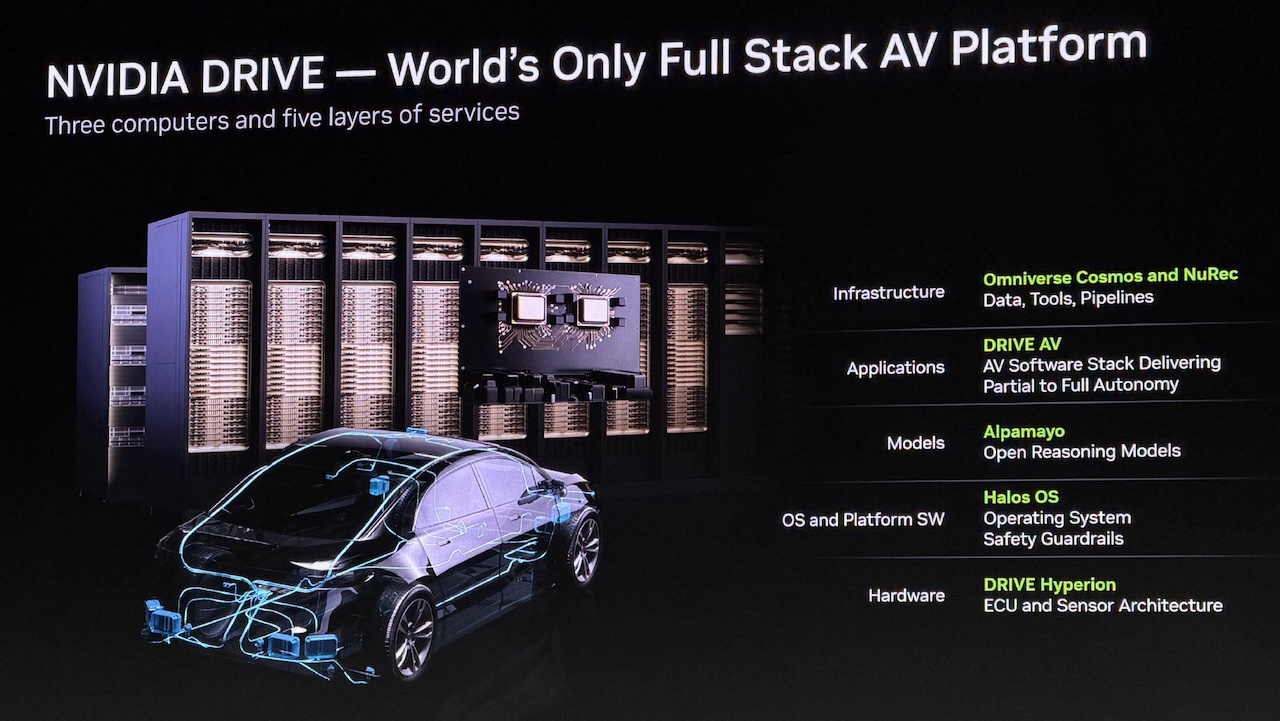
▲NVIDIA DRIVE全栈自动驾驶平台
再加上Bolt、Grab、Lyft、TIER IV等出行或自动驾驶参与方也在使用这一平台,英伟达这次进一步打开了“自动驾驶平台生态”的市场。
此前,不同车企、不同传感器组合、不同地区法规,往往会把开发和验证流程切得很碎。
英伟达给出的办法,是用DRIVE Hyperion把计算平台、传感器、车载网络和安全系统尽量标准化,再用Halos OS把安全架构打包成统一底座。
按照官方表述,Halos OS建立在ASIL D级DriveOS基础之上,提供三层统一安全架构,既包含安全中间件,也包含可部署的安全应用,其中还包括面向NCAP五星主动安全的安全栈,目标是为面向推理式AI的自动驾驶系统提供“可验证、可量产”的汽车级安全基础。
结语:英伟达完善全套自动驾驶技术栈
从CES2026以来,英伟达开始进一步将汽车业务的重点放在L4标准化平台、统一安全架构、推理式驾驶模型和高保真仿真工具上。
与此同时,在更广义AI部分,英伟达继续把世界模型、机器人模型和边缘硬件串成一条链。
随着这些发布,英伟达能否将这些业务模式真正转化为大规模商业化,还要看车企验证进度、各地监管、以及Robotaxi和工业机器人运营落地的节奏