在此背景下,智一科技旗下硬科技讲解与服务平台智猩猩,联合智能汽车产业新媒体车东西发起主办的2023全球自动驾驶峰会(GADS 2023)将于12月19日在深圳举办。
峰会以「奇点将至 共赴繁荣」为主题,将邀请40+位自动驾驶领域的学术代表、商业领袖、技术专家、青年学者、资深投资人和分析师,解构高阶智驾的创新密码,共探自动驾驶的奇点时刻。本届峰会将由主会场会议+分会场论坛+展览+榜单组成。
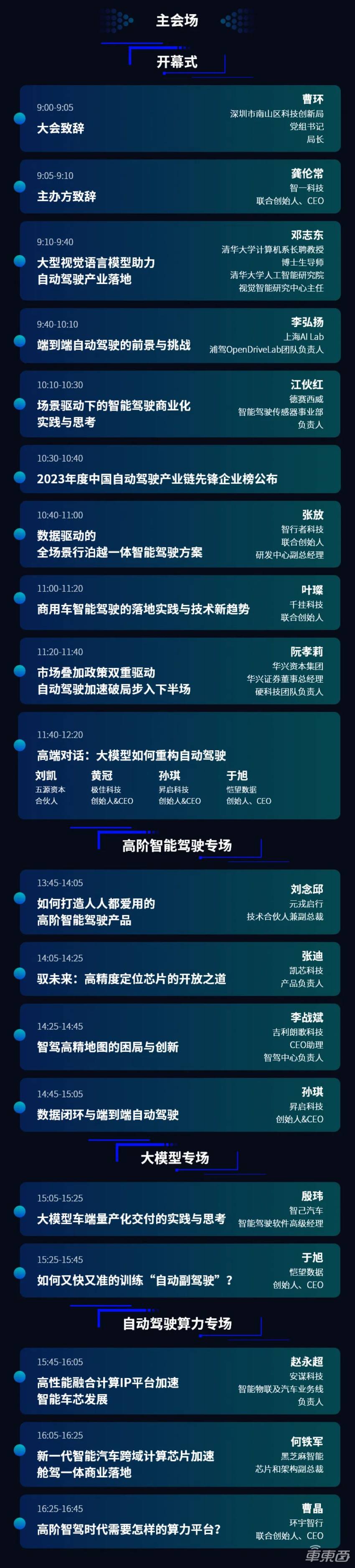
主会场会议将依次进行开幕式、高阶智能驾驶专场、大模型专场、自动驾驶算力专场。17位嘉宾将进行报告、演讲和高端对话。分会场则将举办三场论坛,分别是深圳南山智能网联汽车政企交流会(邀请制)、自动驾驶分析师论坛(收费制)、自动驾驶BEV感知技术论坛(收费制)。其中,自动驾驶分析师论坛、自动驾驶BEV感知技术论坛主要面向持标准票、贵宾票参会的用户。
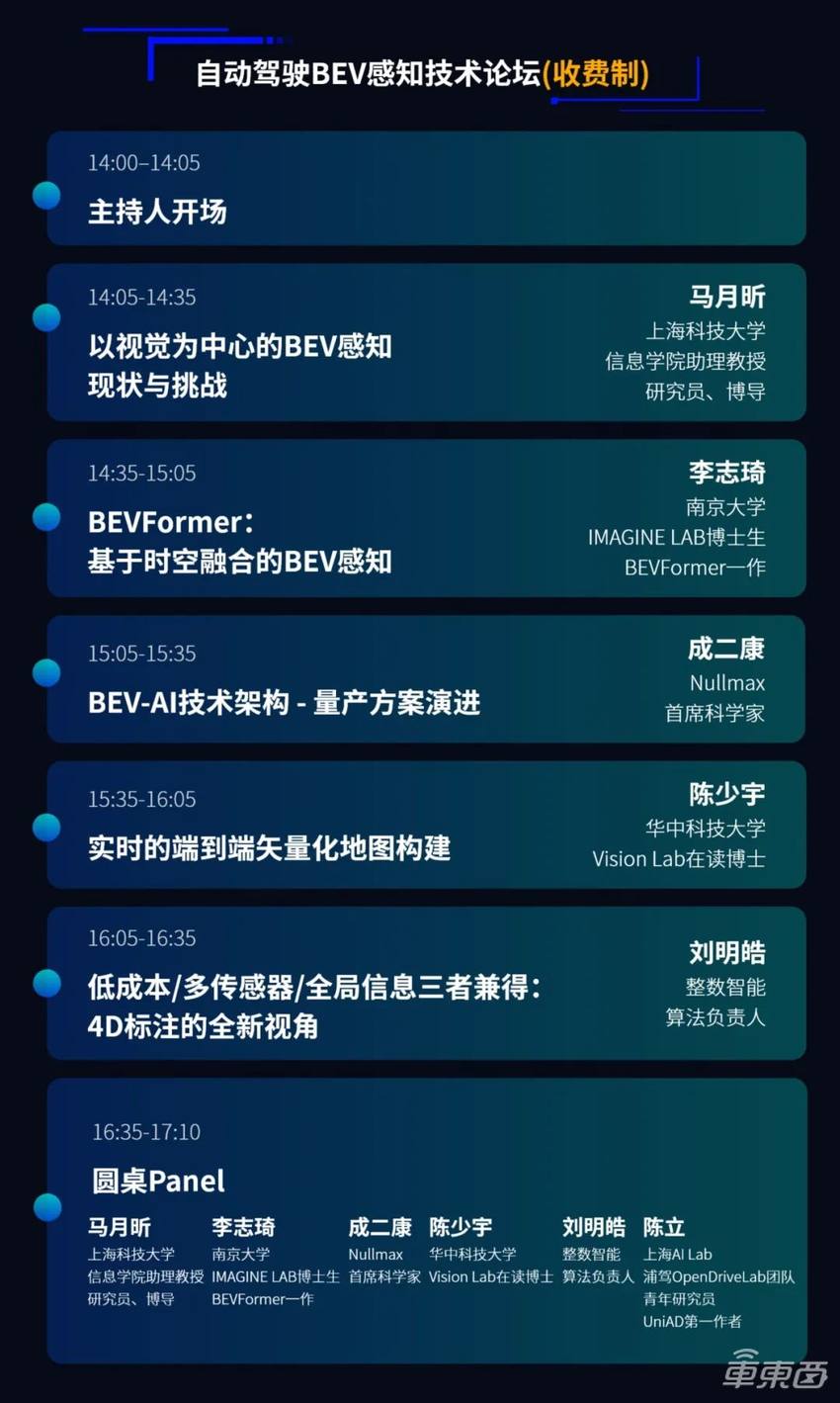
其中,自动驾驶BEV感知技术论坛邀请到上海科技大学信息学院助理教授、研究员、博导马月昕,南京大学IMAGINE LAB博士生&BEVFormer一作李志琦,Nullmax首席科学家成二康博士,华中科技大学Vision Lab在读博士陈少宇,整数智能标注算法负责人刘明皓,上海AI Lab 浦驾OpenDriveLab团队青年研究员、UniAD第一作者陈立参与。六位学者和技术大咖将分别针对以视觉为中心的BEV感知、BEVFormer、BEV-AI技术架构、端到端矢量地图构建、4D标注等议题,带来主题报告及圆桌Panel。
峰会电子门票分为免费票、标准票和贵宾票。免费票经审核通过后,可参加主会场会议。标准票、贵宾票均需购买。
划重点啦!持标准票除了可参加峰会的主会场会议外,还可参加自动驾驶BEV感知技术论坛、自动驾驶分析师论坛;贵宾票,则在标准票基础上,可享受在主会场开幕式拥有专属姓名桌卡和前排席位。
下面为大家介绍自动驾驶BEV感知技术论坛及主会场议程,已经等不及的朋友可以直接扫描下方二维码,添加小助手报名啦!

内容概要:
近年来,以视觉为中心的BEV感知在工业界和学术界引起了极大的关注,这主要得益于BEV表示的固有优势:可提供丰富的语义、准确的定位、精准的尺度等信息直接服务下游预测、规划等任务,以及为多视角融合、时序融合、多智能体融合提供了物理层面较为合理的表示基础。
本次报告将对以视觉为中心的BEV感知进行较为全面的综述,对该领域的流行算法进行系统性梳理与总结。同时,报告将围绕该领域依旧存在的痛点与难点,提供潜在的研究方向与解决思路。
2、南京大学IMAGINE LAB博士生、BEVFormer一作 李志琦

内容概要:
BEV 感知通过将多视角相机进行前融合,从而能够在统一的特征空间进行 3D 感知,摆脱了传统方法对于后融合的依赖。近两年,包括 BEVFormer 在内的一系列 BEV 感知方法通过引入时序信息,优化深度估计等技术,大幅度提高了纯视觉自动驾驶感知的精度。
本次我将简要回顾 BEVFormer 方法和后续改进,并且介绍基于 BEVFormer 进行端到端自动驾驶所面临的问题和挑战。
3、Nullmax首席科学家 成二康

发表50余篇国际学术会议和期刊论文,其中部分研究成果发表在人工智能国际会议CVPR、ICCV、ICRA、IROS等并拥有多项中美计算机视觉专利。
报告主题:《BEV-AI技术架构 – 量产方案演进》
内容概要:
如今,行泊一体方案量产落地已成业内关注焦点,这对于整个系统的技术架构提出了极高要求,包括如何处理相机、毫米波雷达等多个传感器的输入,如何高效支持行泊一体中的融合、定位、规划和感知等多个任务等登。
为此,Nullmax开发了一套强大的平台化BEV-AI技术架构,特别对BEV + Transformer的技术架构进行了充分的考虑,已经在技术研发和项目落地两方面同步进行了大量工作,取得了不错进展。
在此次分享中,Nullmax首席科学家成二康博士将以《BEV-AI技术架构 – 量产方案演进》为主题,介绍Nullmax如何通过迭代升级整体技术架构,为“现代化”的全场景行泊一体应用提供至关重要的技术支撑,为自动驾驶的落地带来全方位的优势,不断推动高阶智驾加速走向普及。
4、华中科技大学Vision Lab在读博士 陈少宇

内容概要:
在过去的几年时间里,自动驾驶技术逐渐由规则驱动向数据驱动转变,神经网络正逐步取代人工设计的规则,展现出更好的泛化能力。同时,“轻地图、重感知”成为业界的共识,在线地图构建成为高阶自动驾驶的关键一环。
本次报告将分享基于数据驱动的端到端矢量地图构建范式,以及该范式在上游数据闭环和下游决策规划的延伸应用。
5、整数智能标注算法负责人 刘明皓

内容概要:
Tesla AI Day 2022的分享中对比了各个自动标注的质量与成本,我们基于特斯拉提出的4D标注的概念开发出了一套基于时序的高校标注工具。工具以全局地图为核心,分别构建了Lidar Base和Camera Base两条Pipeline以适配各种传感器组合。标签带有拓扑结构,同时每一帧也能继承全局信息,减少帧间Gap。工具在提高质量的同时能将成本降为传统标注方式的20%,而标注速度却提高了4倍。
在本次报告中我们将对4D标注历程进行简单回顾,并对位姿计算及全局地图构建进行介绍,最后以全局地图为中心探索更高效的数据生产流程。
6、上海AI Lab 浦驾OpenDriveLab团队⻘年研究员、UniAD第⼀作者 陈⽴