车东西(公众号:chedongxi)
作者 | 极果
编辑 | Juice
什么才是真正的豪华车?
其实不难发现,眼下已经是智能电动汽车的全新时代,越来越多消费者购车时也都越来越倾向于购买带有智能驾驶系统的车辆。

▲阿维塔11
无形之中,以智能驾驶为代表的智能化系统已经成为了定位豪华电动车型的核心竞争力。
在很长一段时间里,特斯拉都被视为量产自动驾驶领域的领头羊,凭借如雷贯耳的名声和优秀的口碑,Model Y也成为了SUV细分市场的销量之王,正巧我的一位同事在前阵子大降价时也订购了一辆。

▲特斯拉Model Y
但实际情况是,虽然特斯拉的FSD Beta迟迟没有办法在国内落地,体验已经不如目前很多国产新势力车企了,并不是太建议购买。
为了证明观点,今天我们就找来了国产新势力的代表:阿维塔11 ,挑战一下,在全球热销也使其成为了美国新能源汽车的代表之一的Model Y。不要小瞧今天的主角,阿维塔11它可是深得长安、华为、宁德时代三家真传,并且还开放了在部分城区导航辅助驾驶系统,可以说是满满的豪华配置。
▲阿维塔11和特斯拉Model Y的智驾挑战
那接下来,我们一起看看两台车智能驾驶体验如何?谁才能称得上是当下豪华智能电动车之王!看看我们能不能劝退订购特斯拉的同事。
一、1500km长测,三大用车场景,鹿死谁手?
为了对比体验两台车的智驾系统,车东西团队设计了一条从上海到深圳累计超过1500km的测试路线,针对高速、城区、泊车三大实际用车场景,来看看两车的真实表现。

▲测试路线
正式开始测试之前,先来看看两台车的配置。
特斯拉Model Y相信大部分朋友都不陌生,祖传的多摄像头+雷达方案,智能驾驶芯片是两块特斯拉自研的FSD芯片。
阿维塔11搭载的是华为的智能驾驶系统,在摄像头和毫米波雷达之外,车辆的前方和侧面还安装了三颗激光雷达,并且还搭载了华为提供的高性能智能驾驶计算平台,而且还有激光雷达加持。
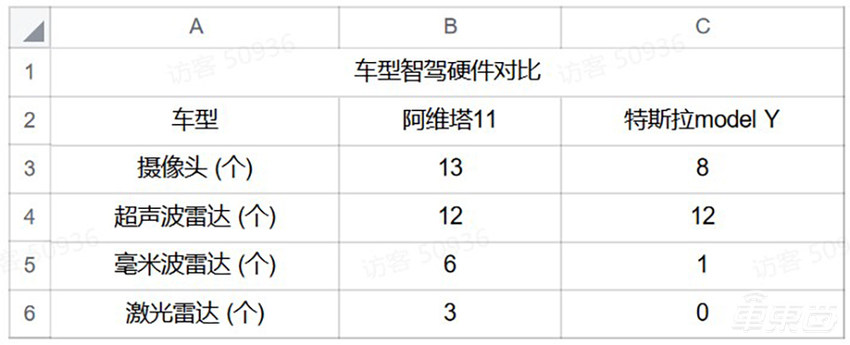
▲车型智驾硬件对比
单从纸面参数来看,阿维塔11完全是碾压级别的存在,那么问题来了,实际情况到底是特斯拉的辅助驾驶系统更强还是阿维塔11更占优势呢?
二、第一回合:高速五项对决,阿维塔表现老练,特斯拉激进吓人
逢年过节,高速路段绝对是最热门的用车场景。
相较于在城里开车,高速相对来说更累一些,因为这个时候驾驶员不仅精神要高度集中,而且身体又要长时间保持同一个动作,腰酸背痛还容易犯困,真的顶不住。

▲高速驾驶
而有了高速导航辅助驾驶功能的车辆,不仅可以自主控制车速,而且还能完成自动变道超车,甚至可以主动上下匝道,妥妥的长途救星。
其实高速智驾场景非常地简单,总结下来也就五个场景:谨防加塞、变道超车、异形静止、隧道场景、进出匝道。接下来我们的对比也会围绕这五个方面展开。
当两台车都开启导航辅助驾驶后,车辆会按照设定的速度,保持在车道中央自动行驶,并自行控制加减速,这个基础功能上,两台车实际体验没什么差别,都能稳定的行驶在车道线中央,方向盘也不会画龙。

▲车辆驾驶体验
当其他车辆加塞时,特斯拉可以较早感知,等加塞车辆跨过车道线以后,Model Y就能平稳地减速了。

▲特斯拉感知
阿维塔11这边,因为有激光雷达的原因,当其他车加塞时两侧的激光雷达能够准确感知,待前车跨入本车车道线之后,车辆同样可以平稳减速。并且当遇到大车的时候,阿维塔还会有一个轻打方向和轻点刹车的避让动作,体验还是很不错的。

▲阿维塔11感知
另外,因为特斯拉对加塞车辆的感知主要靠摄像头,受光线、车辆颜色影响,出现误判的概率会比较高,在旁边车辆没有变道意图的时候来一脚刹车,体验很糟。相比之下,阿维塔11用多种传感器,分别做环境感知,就没有出现过幽灵刹车。
当然,既然是长途旅行,车辆也不可能一直待在一个车道里行驶,接下来就让我们看看两台车自动变道超车能力。
阿维塔这边,变道欲望比较强烈,前面有龟速车或者有并行车辆把路堵死,车辆都会变道找找机会。并且阿维塔的变道速度和变道时机掌握得不错,而且没有大脚油门大脚刹车,整体体验非常不错。

▲阿维塔变道
特斯拉这边,虽然变道模式选择了极速,但行驶中变道超车的欲望并不是那么强烈,比如现在这个场景下,前方车辆车辆行驶较慢,左侧车道有空位,但它却坚持沿着当前车道行驶。

▲特斯拉变道
但是真正当特斯拉变道时,整体感觉大部分时候都很激进,让人心里很没底子,比如这个地方向右变道明显没什么意义,并且还是实线,特斯拉就要冲过去了。

▲特斯拉变道
整个变道体验部分,阿维塔11显得更成熟,也让人觉得更踏实。
第三部分是前方静止异形车场景,这个部分非常考验车辆的识别能力,对于摄像头来说,很难识别形状怪异的车辆且雷达会把静止和缓行的物体过滤掉,如果不及时接管,会很危险。
像我这车次遇到的施工道路变窄情况,特斯拉可以识别前方锥桶,但根本不会避让和减速,如果不是驾驶员接管,直接就撞上了。

▲特斯拉障碍物检测
阿维塔这边因为有激光雷达加持,即使遇到特殊障碍物也依然能够通过雷达反射点聚类的方式知道前方有物体,因此在同一场景下,阿维塔能实现减速,并且避让,顺利通过此路段。

▲阿维塔障碍物检测
接下来的隧道场景也是如此,进出隧道光线明暗变化,对摄像头能力无疑是一种考验,很明显特斯拉并不擅长应付隧道场景。

▲特斯拉进入隧道
进入隧道前,车辆会突然出现辅助驾驶降级的情况,并且无法正确调整限速,经常超速进入隧道。
反观阿维塔11,即使面对隧道场景,也依旧能够平稳行驶,丝毫不受影响。高速智驾的最后一个要点是匝道场景。

▲阿维塔11进入隧道
自动进出匝道是高速导航辅助系统的核心特点,车辆在保持居中行驶并自动变道的前提下,还能知道什么时候换高速或者下高速,车辆自己可以进入匝道、汇入主路,非常方便。
阿维塔这边,会在距离匝道2公里左右的地方开始主动变道,即使在车流密集的情况下,车辆也能顺利找到机会进入匝道。

▲阿维塔主动变道
进入匝道之后,阿维塔11在弯道可以平稳行驶,匝道内分岔路也能顺利通过,速度也能看齐限速。

▲阿维塔进入匝道
出匝道之后,阿维塔11 汇入主路的决策也非常果断,可以根据不同车道线调整不同的速度,并及时汇入最左侧道路,整体感觉非常靠谱。
特斯拉这边下匝道的设定和阿维塔类似,一般在距离匝道还有两公里的地方,它会主动向右变道,准备进匝道,这么看起来是个不错的设计,也符合人类司机的习惯。

▲特斯拉进入匝道
但是遇到标线不清晰的地方,特斯拉会在匝道口上偶尔抽个风。

▲特斯拉抽风
进入匝道内,特斯拉的行车体验也是很不错的,基本和阿维塔11 没什么区别,方向盘非常地稳,就像在地上扎马步一样。

▲特斯拉匝道内驾驶体验
但出匝道的时候,特斯拉这边非常尴尬,经常会没办法及时提速,导致无法及时并入主路,并且还出现了并入主路后没办法解除匝道限速的情况,只能手动提速,非常尴尬。

▲特斯拉出匝道
总的来说在整个高速路段,特斯拉给人的感觉是激进、超车迅猛、跟车距离近,让人感到持续紧张;而阿维塔给人的感觉是老练、超车更自如、缓慢且有节奏的跟车,让人更放心,遇到侧面车辆过近时,还会适当微调方向,主动避开障碍物等,表现的非常沉稳,值得信赖。
除了智驾能力更强,阿维塔11的NVH也非常优秀,在同样100km/h的速度下,比特斯拉要安静很多。

▲阿维塔驾驶安静
这样的表现,离不开阿维塔11在车上使用的扎实隔音材料,并且车内还搭载了降噪耳机同款的主动降噪技术,能让车内发出抗路噪声波,让驾驶环境更加安静。
在第一回合高速上,无论是辅助驾驶还是行车质感,特斯拉都略逊一筹,那么在城区表现会如何呢?
三、第二回合:阿维塔11城区NCA独角戏,避让鬼探头外卖小哥,大显身手
其实在现在这个新能源市场日渐成熟的时间点,一辆带有智能驾驶系统的车已经很常见了,但事实上,大部分车型都先把场景集中在了高速,而其实绝大部分用户都习惯在城市内用车,所以城市智能驾驶部分也非常重要。

▲城市驾驶
我们模拟了一条在深圳正常驱车上班的路线,主要涉及市区道路来对比感受下两台车的城市智驾能力。
但是,开头也提过,特斯拉的FSD目前还主要针对北美路况,在国内还无法使用,所以第二回合还没开始,特斯拉就已经出局了。
所以接下来,变成了阿维塔11城市NCA独角戏。城市NCA的开启方式同样很简单,设置好目的地之后,仪表上出现NCA标志就可以下拨两次拨杆开启功能。

▲阿维塔11城市NCA
智能驾驶系统最基础的功能,是沿着车道线居中行驶,并根据前车的距离自行控制加减速。前面在高速上我们已经领教过了,虽然看起来很简单,但是在城区更复杂。
复杂的第一点其实和高速类似,也是加塞和障碍物避让问题,但是城市里车更多,加塞发生的次数更多,并且还有各种小路、行人、自行车以及各种奇怪的障碍物,还有各种遮挡的视觉盲区,对智驾系统的感知和避障能力提出了极高的要求。
前面在高速上已经介绍过阿维塔11对于汽车加塞的场景,咱们这次主要看看它对其他障碍物的感知和躲避能力,以及在遮挡等特殊场景下的表现。
比如这个情况,人行横道上有位老大爷正在晃晃悠悠骑着自行车,即使面对绿灯,阿维塔11也提前做出了避让动作,等老大爷完全停下之后,才迅速通过。

▲阿维塔11避让行人
再比如这个修路的路口,阿维塔11显示用很柔和的刹车,避让了突然出现的电动车,之后还避让了正在通过道路的行人,最后还放行了从右边插进来的面包车,这波三连考验,阿维塔11表现的不错。

▲阿维塔11路口刹车
除了以上两个难点,十字路口也是非常考验NCA的一个场景,又得精准识别红绿灯,还得识别颜色和形状,这样才能做到红灯停,绿灯行。
比如这个路口,阿维塔11识别到黄灯以后也并没有加速,而是稳稳的停了下来。

▲阿维塔11识别信号灯
除了正常的右转直行,路口最难的情况还得是无保护左转,本车左转的时候需要和直行车辆进行博弈,这时候考验的是见缝插针的能力,既要感知做得好,还需要对其他车辆的行为做出预判才能实现。
虽然没找到对向来车的十字路口,但是面对来自旁边车道的博弈,阿维塔11表现得临危不乱,每次转弯都稳稳当当。

▲阿维塔11转弯
另外可以看到,阿维塔11的建模范围非常广,已经辐射到了对向车道,甚至连前车的转向灯,刹车灯都可以识别,这也是激光雷达的优势之一,看得广还看得细,防患于未然。

▲阿维塔11建模
总而言之,开启了NCA的阿维塔11,可以自主选择行驶路线,然后在通过沿途避障,礼让行人,无保护左转等一系列操作把你从家里直接送到公司。

▲阿维塔11开启NCA
顺便一提,跟车启停的部分真的做得非常丝滑,跟专车老司机没什么区别,强烈推荐大家有机会也去试一试。
话又说回来,阿维塔11能在市区有这样的表现,离不开丰富的传感器配置和华为优秀的算法,在城市这种复杂场景下,只有传感器数量够多,才能感知得足够广,足够精确。
华为的工程师此前告诉我们,NCA的首要目标是给用户提供足够好的体验,因此在技术路线上并不会盲目追求新技术,而是潜心把成熟技术用到最好,这样才能给用户带来更好的体验。

▲阿维塔11的技术路线
现在高速和城市路段,特斯拉都输给了阿维塔11,那么接下来的泊车场景又是如何呢?
四、第三回合:泊车测试情况不断,特斯拉竟直接“黑屏”
其实自动泊车对很多朋友来说是一个很纠结的功能,大部分新手司机不敢用,老司机又不屑于用,那我们看看这两辆车,谁的泊车系统更好用。
这里我们找到了一个比较拥挤的停车场,选择同一个倒库和侧方车位,以及难度比较大的车位,来进行泊车测试。其实自动泊车对车辆测传感器和算法要求很高,在车辆这么密集的停车场,一个失误很可能就蹭上了。
从实际情况可以看到,阿维塔11这边只要进入停车场就可以开始扫描车位,几乎所有车位都可以尽收眼底,想停哪个都可以。

▲阿维塔11进入停车场
而特斯拉对车位的扫描,基本可以用随缘俩字就可以概括,有时候人眼能看到的车位,它的摄像头反而看不到。

▲阿维塔11扫描车位
从泊车情况可以看到,阿维塔11无论是面对侧方还是倒库都没什么太大的问题,停得非常迅速老练,面对难度比较大的车位,也能顺利泊入。

▲阿维塔11倒车入库
反观特斯拉这边,倒库四次,两次露出车头,两次扫描不到车位,最后直接拉闸不干了。后面的侧方泊车停得倒是挺快的,但是贴路边又太近,体验上简直可以说是灾难了。

▲特斯拉倒车入库
第三回合特斯拉又败了,阿维塔11的行泊一体架构,不仅能调用全车传感器,而且配合激光雷达,能对困难车位也进行准确识别,并且在整个停车过程中阿维塔11给人的感觉非常像人类老司机,可以实现转向和油门几乎同时操作的效果,遇到一些实在不方便上下车的车位,阿维塔还支持遥控泊车,可进可出。
而特斯拉这边,目前只靠摄像头和超声波雷达粗略地估算记录,其实本质上更像盲人摸象,用起来确实体验一般。
新手停车再也不用害怕,老司机使用也更加从容,复杂的事变简单,这不就是科技进步的意义吗?
结语:真智能才是真豪华,阿维塔11做到了
经过了这段时间的测试,车东西觉得优秀的辅助驾驶系统,是真的可以帮驾驶员排忧解难,保障安全,但是使用体验一般的系统,只会让人觉得更累。
顺便一提,我的那位同事,已经把特斯拉退了。
总的来说,虽然特斯拉的AP并不是业内最早量产的自动驾驶系统,自从14年问世至今,已然成了全球范围内部署规模最大,运行里程最长的自动驾驶系统。
但是很明显在现阶段的国内,阿维塔11基于华为ADS打造的辅助驾驶系统,既可以做到高速 NCA 又可以做到城市NCA,又能在停车场流畅使用,无论是在场景还是功能方面,还是略胜一筹。
除了辅助驾驶,阿维塔11的工艺、用料、用车体验都要比Model Y强上不少,并且在安全方面,阿维塔11还在制动、供电、转向三个方面做了双冗余保险设计。

▲阿维塔11设计
制动方面,两套系统除了能够正常给车子提供制动力以外,当其中一套系统失效之后,另一套系统也能及时顶上,保证车辆安全。
电池方面,除了宁德时代提供的动力电池以外,阿维塔11还搭载了一个备用的低压蓄电池,这个电池可以在保证主蓄电池失效之后,车辆依旧能稳定靠边,而不是突然黑屏。
转向方面,阿维塔11在转向电机里搭载了2套绕组,能够在一组失效的情况下,让另一组保持转向的正常稳定。
三个大冗余下还有各种芯片、传感器的冗余,阿维塔11可以说是从硬件上武装到了牙齿。目前看来,阿维塔11应该是我心目中真正的豪华智能车,同时也希望各厂家都能在智能驾驶方面好好地卷一卷,为用户带来更好的使用体验。