








车东西(公众号:chedongxi)
作者 | 迩言
编辑 | Juice
就在前几日,由车东西和智东西公开课联合主办的“GTIC 2022全球自动驾驶创新峰会”在深圳成功举办。
峰会以“加速落地 砥砺前行”为主题,共设置了自动驾驶高峰论坛、量产自动驾驶专题论坛、自动驾驶芯片与域控制器专题论坛和L4级自动驾驶专题论坛四个论坛,共有19位嘉宾进行主题演讲和致辞。
集度汽车、小鹏汽车和长城沙龙业务负责人同台演讲,分别分享了自己在量产自动驾驶方面的思考;元戎启行、如祺出行、小马智行、文远知行等Robotaxi创企则分享了自己在无人驾驶出租车和L4级自动驾驶降维L2方面的进展。
Nullmax纽劢科技、领骏科技、映驰科技等从量产自动驾驶供应商的角度做出了思考;黑芝麻、后摩智能、探维科技则分别从自动驾驶芯片和激光雷达方面对自动驾驶的发展做出了思考;盟识科技、于万智驾则介绍了L4级自动驾驶领域细分赛道的发展情况。
本次峰会上,国内自动驾驶技术专家、西安交通大学薛建儒教授在上午的自动驾驶高峰论坛上做开场报告,题目为《类人智能驾驶的探索与实践》。

▲西安交通大学教授薛建儒发表演讲
薛教授在报告中介绍了在交通场景理解、情境预测与驾驶决策上的难点问题,并介绍团队在无人车自主定位、考虑交通参与者行为预测的驾驶策略学习等问题的研究进展。
薛建儒表示,引入脑科学的研究成果,并作为构建认知计算框架的基础才能真正地实现自主驾驶的目标。
以下为薛建儒演讲干货:
一、自动驾驶难点重重 单目视觉定位可达厘米级精度
薛建儒表示,实现自动驾驶有两条技术路线:自主智能和协同智能,自主智能通过多传感融合的环境感知、鲁棒优化的运动规划和控制实现无人驾驶。协同智能则是通过引入人的作用、车与车、车与交通设施互联互通实现无人驾驶。
自主智能与协同智能是实现自动驾驶的两种不同途径,但需要指出的是自主智能依然是自动驾驶核心。
一个典型的自动驾驶系统,输入地图和环境的感知,然后输出决策和执行,这种技术路线也已经得到了验证。针对这一技术路线,薛建儒表示主要有两个关键点,一是环境的理解和预测,二是运动规划和控制。
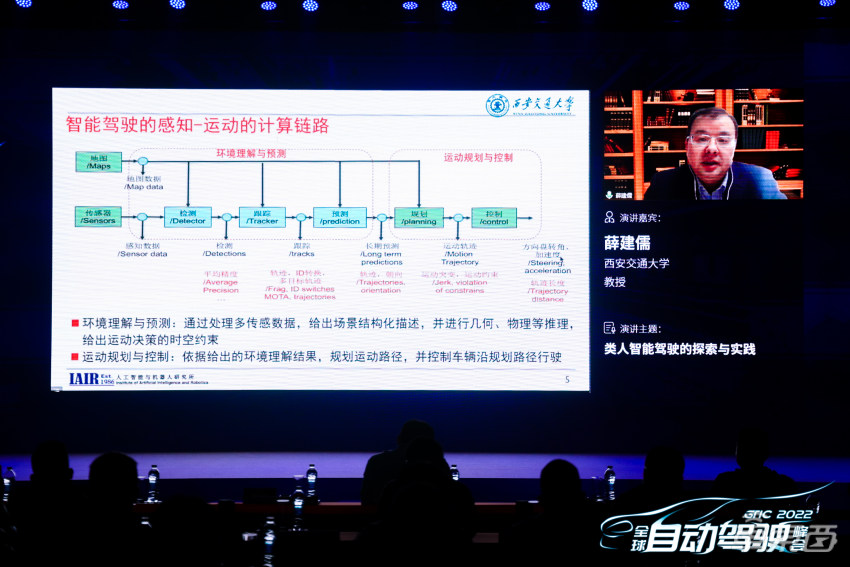
▲西安交通大学教授薛建儒讲解技术路线
薛建儒说,自动驾驶是一个复杂的智能系统,包含了多个环节,每一个环节都包含了很多的技术难点。
在谈到作为自动驾驶难点之一的交通场景的识别和理解时,薛建儒表示,这一过程主要分为两个层面,分别为定位导航和自主避障。
在定位导航方面,传统的方式为全球卫星定位系统和地图配合来实现定位,然而在自动驾驶领域,这样的定位能力无法满足高精定位的需求。
为此行业内推出了高精度地图技术,高精度地图也经过了三个阶段的发展,通过多传感器采集局部测量,局部测量时空对齐、逐层抽象,形成占据栅格地图。
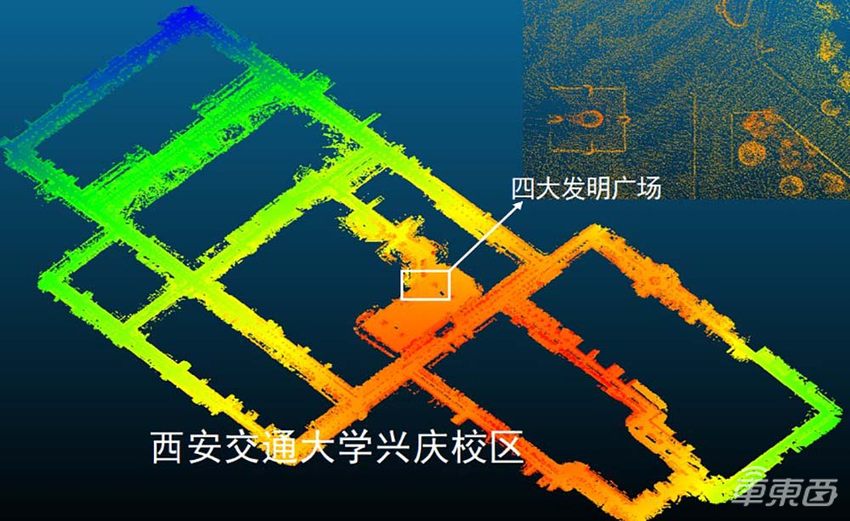
▲3D栅格地图
在占据栅格地图的基础上,叠加上道路边界、车道、路口的情况等,形成一个更高精度的混合地图,可以实现无卫星环境进行定位。
薛建儒说,现在的地图正沿着这样的发展趋势进展,目前占据栅格地图已经非常成熟,混合地图正在成熟过程中。
目前配备了自动驾驶功能的智能汽车都搭载了高精度地图。然而,高精度地图创建、存储与更新代价昂贵,且有经验的驾驶员大脑里存在一张经验地图,能否在自动驾驶上实现这张经验地图?大脑对环境的理解是以语义概念为基本单元的层次化组织,例如车辆、行人,交通标识等。基于这样的思考,薛教授的团队开始探索语义矢量地图。
目前薛教授的团队提出了单目视觉定位技术,通过与神经网络技术的结合,实现了视觉语义地图构建和定位技术,实现了厘米级定位精度。
对于动态场景的检测,薛教授认为,目前的检测方法识别率都到达了90%以上,但对于自动驾驶来说,还不够准确,行业内正在考虑检测、跟踪和预测的一体化技术,并结合3D形状重建、语义分割等现有技术。
二、借鉴人脑感知 实现类人类自主驾驶
薛建儒表示,通过对场景的理解和预测才可以做出驾驶决策。而根据场景的约束和车辆本身的条件,可以从行为决策、运动规划和运动控制三方面给出一个最优的决策,实现车辆的自主运动。
目前薛教授团队已研究出了大量的方法。例如,对于高速道路上的运动轨迹规划的问题,团队提出了多窗口分层抽样的轨迹变化方法,同时为了加快抽样的效率,团队提出了高效抽样的路径规划算法,在轨迹规划和路径规划上采取了不同的研究角度。
此外,薛教授还表示,过去他们在大量的场景中进行了规划和控制算法的测试,其中值得注意的是,靠传统的流水线架构的方法存在问题,自身能力比较弱,因此如何使得自主驾驶能实现类人的智能驾驶就十分关键。

▲不同城区环境下的综合测试
在长期的自动驾驶研究中,薛教授团队认为可以借鉴人脑感知—运动回路的强容错、高能效、自学习等机制,研究受脑认知与神经科技启发的交通场景理解、情境预测和驾驶决策方法,使自动驾驶系统能够应对更多复杂的场景。
针对类人智能驾驶,薛教授团队正在进行针对交通情景的长时间预测,为了支持这方面的研究,薛教授团队设计了一个交通参与者行为预测的BLVD数据集,对轨迹、行为、意图进行收集。
通过视点自适应的行为识别,来识别视点的不同变化,确定了行为以后,可以对行人的运动轨迹进行预测,考虑行人之间的互相影响之后,可以得到一个更加准确的预测。
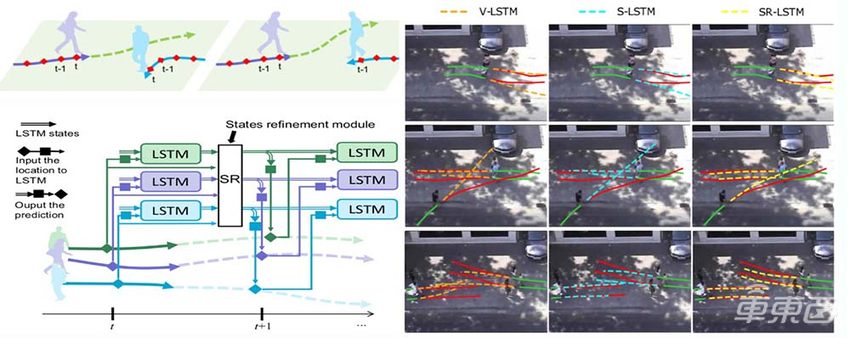
▲行人运动轨迹预测
此外,薛建儒还表示,需要对事件进行一些预测,薛教授团队选择的是交通事故的分析,通过对交通事故进行分析和预测,判断驾驶员的注意力情况。
那么在驾驶决策中怎么引入类人驾驶策略呢?薛教授团队进行了模仿学习和强化学习相结合的方式,还进行了驾驶行为引导的模仿,引导生成一个最佳的驾驶行为轨迹。
在最后,薛教授表示,为了实现真正的自主驾驶,就必须要构建一个有直觉性的认知计算框架,让系统无限的接近人脑,这是他们一直努力的目标。

