








车东西(公众号:chedongxi)
文 | 晓寒
4月19日,由车东西与2019上海车展承办方——上海市国际展览有限公司(SIEC)联合举办的GTIC 2019全球智能汽车供应链创新峰会在2019上海车展同期举办,大会邀请到来自学术界、整车企业、零部件企业、互联网公司、新兴自动驾驶公司和人工智能公司等智能汽车供应链领域的15位嘉宾登台,探讨智能汽车时代的供应链创新与出行变革。
国内车路协同技术的研究领头人,清华大学自动化系教授、自动化系系统工程研究所所长张毅教授为大会作了开场演讲。
张毅教授讲到,汽车产业在与IT、通信等领域跨界融合时面临新的挑战,呼吁车路协同技术予以解决。我国自2011年起开始立项研究车路协同技术,用7年多的时间已经走过了美国14年走过的道路,目前已进入规模应用阶段。
他指出,车路协同技术的发展应用既能提升交通安全,还能提升交通控制效率,同时还将促使自动驾驶技术的落地与发展,将让交通体系跨入新阶段。
一、汽车与其他领域跨界融合加速 新的挑战呼吁车路协同
张毅教授在一开场就讲到,现阶段的汽车产业正在快速发展之中,不仅是车企在快速提升汽车各方面的技术和水平,同时还有IT、通信等领域等玩家也在快速切入。例如Uber本身是一家从事共享交通的公司,但其同时还在从事自动驾驶、货运等方面的技术研究。
“我们发现汽车的发展已经不单单是汽车本身,它已经进入了一个跨界融合的时代。”张毅教授讲道。
不过,随着汽车与智能、通信等领域出现大量融合,相应的问题与挑战也逐渐暴露。例如2018年3月18日,一辆Uber的自动驾驶测试车就在美国亚利桑那州出交通事故致使一名行人死亡。
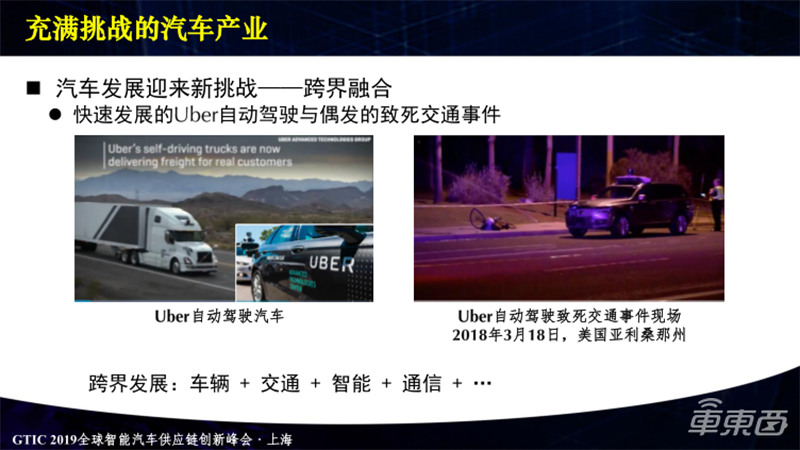
张毅教授指出,目前还没有公开的技术报告分析这起事故,但已知的信息是这辆自动驾驶汽车的感知系统已经感知到了行人的信息,因此问题可能出现在车辆的决策系统上,即车辆的决策系统在做“这是不是一个人?”、“是不是需要停下来?”的决策时出了问题。
“汽车的跨界融合过程中还有许多问题没法逾越,还有很多问题需要解决。”张毅教授总结道,“只有智能的汽车是不够的,还需要智能的路、智能的网、智能的交通,它们结合起来就是车路协同。”
二、车路协同的两大关键应用点:安全与控制
张毅教授在现场表示,车路系统会带来新的交通理念,让交通发展跨入新的阶段。
简单说就是用现有的通信技术将所有的汽车连接起来构成一个平台,让任何车辆在任何时间和任何地点都能做到信息共享和交互。
在发展车路协同技术的过程中,有两大关键应用点,一个是安全,一个是控制。
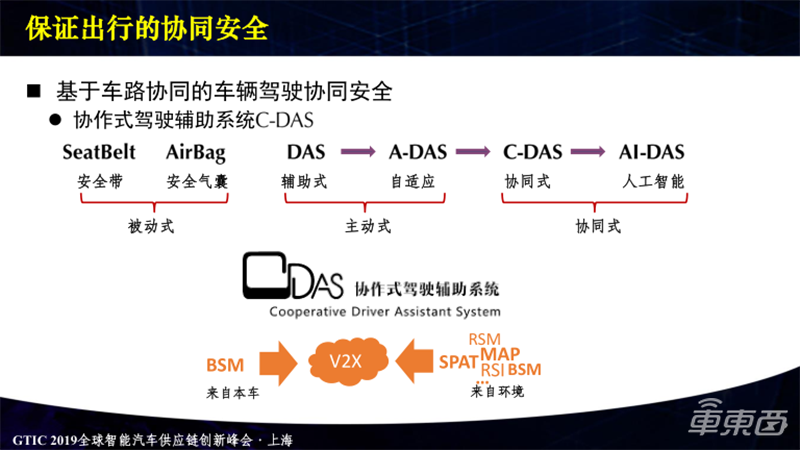
安全方面,车路协同的信息交换平台,可以帮助现有的交通体系从被动安全向主动式安全,以及下一步的协同安全方向前进,即现有的安全体系会从第一代的安全带、第二代的安全气囊,向着第三代的V2V通信方向转变。
张毅教授讲到,现在的自动驾驶汽车还在用单车智能的方式进行运作,即车辆感知到对面来车后,还要想办法感知它想要干什么,然后再进行驾驶决策。决策完了还要看下一步的变化,这是一个很复杂的信息交互决策控制过程。
但有了车路协同技术后,车辆之间就马上知道对方的位置、速度、加速度、刹车与否、转向与否等信息,大大简化了自动驾驶汽车的信息收集和决策难度。
基于这种技术,车路协同还将促进现有的ADAS高级驾驶辅助系统向着CDAS协同式辅助驾驶系统,以及AI-DAS人工智能驾驶辅助系统方向发展。
控制方面,车路协同的信息交换平台,既可以在交通体系内实现多车车速引导,又可以让现有信号灯从被动控制向主动控制,以及下一步的协同控制阶段发展。
此前,国内在交通测试研发中有一个单车车速引导的提法,即在车辆通过路口时会收到推荐的车速信息,帮助顺利通行,减少停车从而减少排放,但问题是无法解决其他车辆的车速引导问题。
在有了车路协同平台后,可利用交汇点协同的机理计算出每辆车的最优速度并发布至各个车辆,从而实现多车速度引导,进而实现更高效的通行。
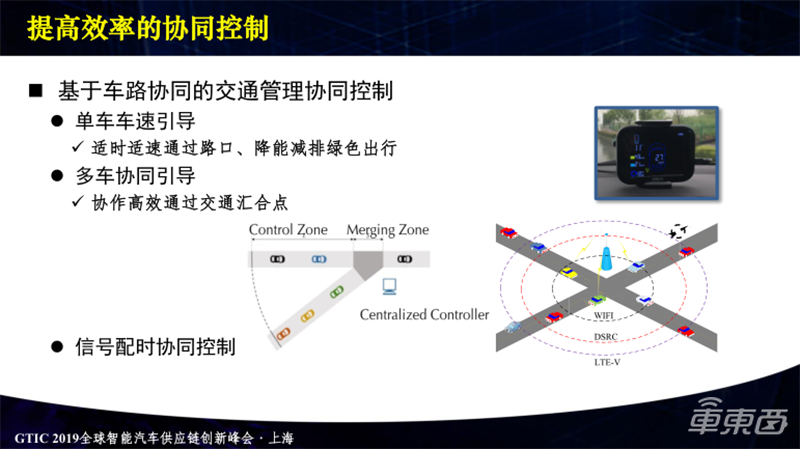
现有的信号灯是被动控制,即在了解到多少汽车到来后调整信号配时,没法引导汽车。想要主动控制,就要实现单车和多车速度引导,将其引导成一个一个车队,每个绿灯放行一个车队。
同时信号灯和车队也要实现交互,信号灯的配时也会随着车队的变化而变化,从而让信号灯控制迈上一个新的台阶。
三、车路协同在我国的应用实践:7年走完美国14年的路

张毅教授讲到,美国在2004年就开始立项进行车路协同相关的研发,虽然叫做其他的名字,但本质是一样的。美国从项目立项、到测试场测试,到真实道路实施,总计用了14年的时间。
我国从2002年提出了这个概念,但真正国家立项开始研究是2011年。到现在,我们已经走过了从立项、到测试场测试,再到具体的工程应用所有阶段,相当于用7年多的时间,走完了美国人14年的路。
具体来说,我国的车路协同最早基于张毅教授所在的国家863计划研究组的研究成果,在我国第一个智能网联汽车测试场——上海国际汽车城进行了示范,随后推广到了二十几辆公交车上,再到重庆、北京、福建等地的测试场的规模化长期测试。

目前,车路协同技术将在中国最快的高速公路杭绍勇高速、冬奥会等项目中实现规模化应用。
去年11月,国内还实现了不同车企、不同通讯模式、不同终端系统的“三跨”式车路协同,而今年交通部、工信部、公安部也将实现跨部门联合部署,真正推动车路协同在中国的大规模应用。
“车路协同作为一个大的技术领域,大规模应用和推广已经成为了现代道路交通里面必然的发展趋势。”张毅教授总结道。
四、车路协同是自动驾驶发展的第三条路径
正是由于车路协同对交通体系发展的重要作用,交通部副部长刘小明2018年在中国电动汽车百人会的论坛上提出,要高度重视自动驾驶和车路协同等前瞻性技术的发展和应用,以智慧交通建设为载体,按照车路协同发展的技术路径,积极推进自动驾驶的发展。
基于这种背景,2018年9月起,国内出现了一个少有的现象——阿里、百度等好几家大公司纷纷设立研究院或联合实验室,在一个月内几乎全部开启了对车路协同技术的研究。
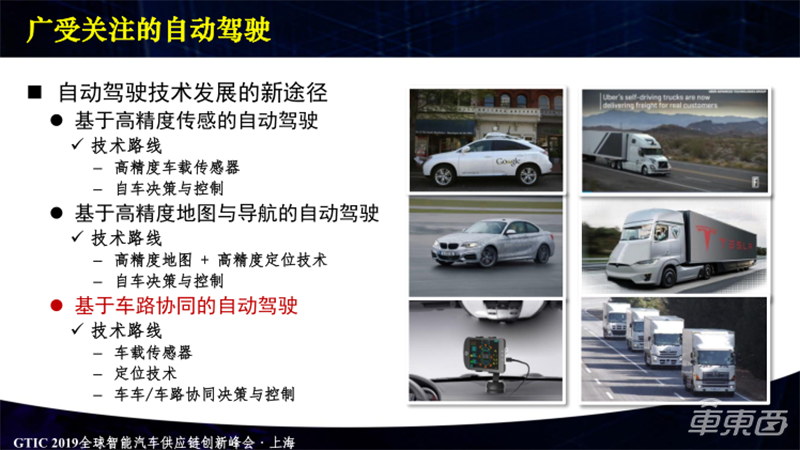
张毅教授讲到,目前研究自动驾驶有两个技术路线,一个是基于自动驾驶的车载高精度传感器,另一个是基于车载高精度导航和高精度地图。
这两个路线略有差别,但本质上都是依靠单车的感知和决策,出现了一些问题。例如2016年一辆特斯拉在自动驾驶状态下撞上了一辆货车。
如果有车路协同技术,让两车做一个交互,卡车的位置、速度、加速度、行进路线等信息一下就获得了,就会为自动驾驶技术提供更好的解决方案。
这就是上述刘小明副部长提出的,基于车路协同的自动驾驶技术,也是自动驾驶技术的第三条技术路线。
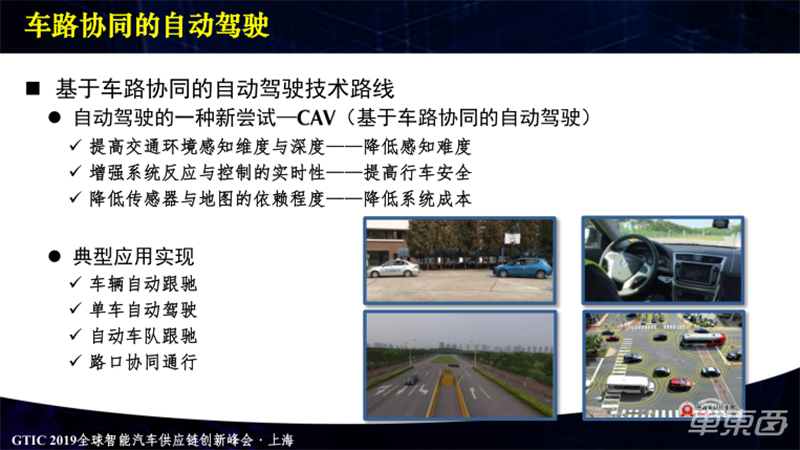
具体来说,车路协同将为自动驾驶汽车带来三大优势,一是提升了环境感知的深度和维度;二是增强了系统反应与控制的实时性;三是降低了对传感器与地图的依赖,进而降低成本。
目前,张毅教授团队已经在上海国际汽车城开发出了初步的基于车路协同技术的自动驾驶车辆。该车除了近距离的环境感知信息来自车辆本身,中远程的驾驶、决策、控制信息都来自车路协同信息交互。
五、车路协同助力自动驾驶超越L5级
在演讲最后,张毅教授探讨了人工智能技术与自动驾驶的关系。
他引用一些院士的论述表示,计算机模仿人去感知环境、模仿人去理性思考、模仿人去执行动作,是人工智能应用的三大标志。
根据院士们的界定,现在应用人工智能技术有一些条件,即需要丰富的数据或知识、完备信息、确定性信息、静态与结构化环境、有限的领域或单一的任务。
而在驾驶领域,这五大条件都无法具备,开车时很多情况是随机的。
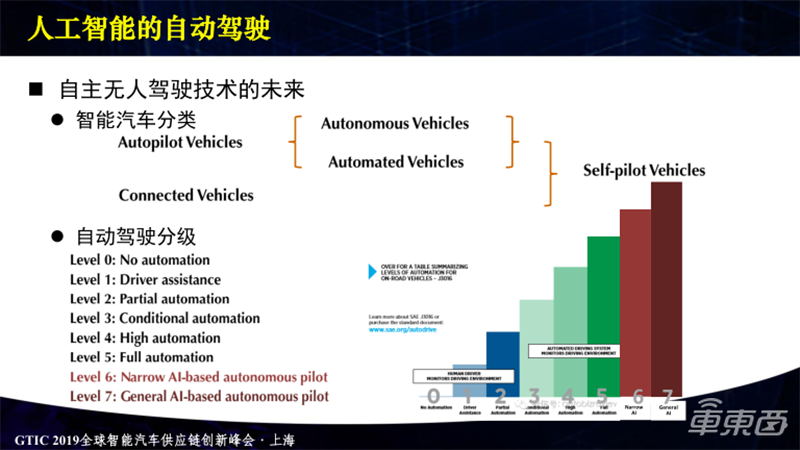
从这些标准来看,目前的自动驾驶还处于自动化的驾驶阶段,自动驾驶汽车还是基于规则行驶的机器人,对应现在的L1—L5级自动驾驶。
而随着人工智能驾驶的发展,未来将先后出现具备弱人工智能和强人工智能技术的自动驾驶汽车,可以分别对应L6与L7级的自动驾驶,而在这一发展过程中,车路协同又是人工智能与自动驾驶完美结合的技术基础。

