车东西(公众号:chedongxi)
文 | origin
车东西9月14日上海报道,第四届APEC-IOV车联网研讨会暨MMC 2017智慧出行周今日在沪开幕,在大会的“智能驾驶商业化初探”论坛上,来自自动驾驶方案公司Tron.ai、新造车企业奇点汽车、ADAS厂商径卫视觉、新兴地图初创极奥科技、固态激光雷达厂商Quanergy的各位代表,分享了他们在智能驾驶兴起下如何将自动驾驶、车联网等新技术落地、如何实现商业化的思考。
一、大多消费者只想为自动驾驶付出10%的溢价

(Tron.ai创始人邓恒)
Tron.ai是一家在总部硅谷的自动驾驶公司,提供自动驾驶解决方案,不过建立者是华人,其日后的技术应用,也会将中国作为主要市场。Tron.ai创始人邓恒称,由于车辆的巨大保有量,中国的自动驾驶市场要比美国、欧洲大得多。
在感知层面的传感器方向选择上,Tron.ai以视觉为主、激光雷达为辅。这种选择最重要的原因是成本。邓恒称,根据统计数据,在愿意接受自动驾驶的消费者中,有41%的人只希望多付出10%的成本,因此,自动驾驶想要被广大消费者接受,必须解决成本问题。而目前激光雷达的成本过于高昂,不利于技术推广。
他称,谷歌选择成本高昂的激光雷达的路径,是认为未来的汽车会是以共享为主,汽车使用时间的增长可以摊薄成本,而无需消费者购买所有权的共享模式也有利于消费者共享。
邓恒还分享到一个观点,他认为目前自动驾驶初创多是IT出身,缺乏汽车背景,做出来的软件更多是Demo。要使自动驾驶真正的应用,需要传统汽车派系+学术派结合,以满足更严苛的安全需求。
也是因为安全缘故,无人车商业化路线上,商用车辆会先实现自动驾驶;而从场景上看自动驾驶的落地,消费者最认可先实现封闭道路的自动停车,然后则是结构化道路。现在自动泊车应用已经比较多,而结构化道路上的自动驾驶,也有类似于通用SuperCruise这样的方案出现。
不过,对于他代表的自动驾驶公司而言,三大挑战——法律法规、伦理、基础设施仍然亟待解决。
二、车联网到底进入了3.0还是3.5?
奇点汽车联合创始人季申认为,现在为自动驾驶赋能的车联网正在步入3.0时代,一个网络、数据充斥着车辆的时代。
在车联网3.0之前,车联网1.0是功能化为出发点,主要就是打电话、或者呼叫系统,以及TSP。车联网2.0的显著特征则是手机互联+后装车机+智能后视镜等终端的兴起。就目前而言,车联网整体还处于2.0时代——2015年,车上用的手机支架卖了400多万个。
季申说,在目前车厂主导建立起来的车联网体系中,车厂与用户的沟通上三大代沟:
1、时间代沟,车厂总是谨小慎微,动作缓慢的。但习惯了互联网快速革新的用户,已经难以容忍车厂的慢动作。
2、理解代沟。车厂对用户的需求不能精准地理解,无法满足个性化的需求。
3、效率代沟。基于前两者的原因,
而要弥补代沟的方法则是:
1、持续迭代,快速响应用户变化;
2、持续运营,通过用户运营持续改进体验;
3、基于互联网技术,通过线上数据在线快速流动。
这一整套,都是互联网的打法。季申的意思不言自明:用互联网的方式改造传统的车联网理念,让互联网出身的企业在车联网中更说得上话。
作为一家新造车公司的负责人,季申也承认了需要遵守造车的基本规律,车辆的底层硬件只能缓慢更新。但用户服务曾则要软得多,在车辆售前、售后、以及用户用车过程中,都可以加深互联网的渗透,从用户体验的角度,去指导服务的更新乃至新车的开发。
不过有意思的事情马上出现了,紧随其后的径卫视觉创始人王波提出,现在车联网正在步入3.5阶段,即车辆除了接上4G网络,寻求用户反馈,还开始应用人工智能,将车辆上摄像头采集的视频信息上传到云端进行处理、做数据挖掘。

(王波)
径卫视觉是一家ADAS公司,能够提供典型的如车道偏离、前向碰撞预警等辅助驾驶功能。王波称,车联网的概念很大,但作为汽车服务的眼神,首先应该做安全网。交通事故中94%是人为因素引发,因此径卫视觉除了开发ADAS系统为驾驶员预警之外,还做了驾驶员的疲劳检测系统。
通过驾驶员注意力检测系统,可以对驾驶员行为进行判定,可以做到驾驶员疲劳驾驶预警,不良驾驶行为预警、司机身份识别、图片视频采集与信息调度;同时配合ADAS系统对行车数据(如速度、刹车、转向)的采集,基本可以还原出驾驶员的整体驾驶行为。
由此,径卫视觉就可以通过对驾驶员的驾驶行为分析,为商用车公司提供驾驶员的安全评估以及针对性的安全培训建议;另外,也可以为汽车保险公司的差异定价提供数据支持。
那么车联网究竟是进入了3.0时代还是3.5时代?或许没有定论,只是不同的公司从不同的角度出发,给出了自己的定义。随着5G到来,车联网显然又会进入另一个时代。
三、廉价众包模式让实时地图更“实时”
极奥科技创始人王雪峰则介绍了众包模式对地图厂商,尤其是极奥这样的初创公司的意义。极奥科技是一家应用视觉方案与众包采集模式的高精地图初创厂商。众包的一大好处是,便宜!

(王雪坤)
此前他们主要通过车辆的GPS位置信息以及G sensor(加速度传感器)信息来形成路网的拓扑信息,同时还能采集到弯道角度和坡道斜率等高精地图才拥有的信息。
众包模式采集地图的一大优势显而易见:人多力量大。
王雪峰称,以上海为例,要形成可用的路网信息,要积累20万辆车 6个月时间来做第一版数据。对于一条多车道的道路,需要2000车次轨迹来形成亚米级路网。当车次轨迹达到5000,上传的信息就可以实现车道级拓扑路网。
此外,众包还有一个好处可以对道路的更改有非常实时的放映。
不过,仅仅依靠GPS和G sensor上传的信息,对构建高精地图来说是远远不够的。想要信息充足,还得依靠视频。因此极奥科技采用了与Mobileye类似的地图采集路线,使用深度学习对的众包手机的视频信息进行分析,不仅形成路网信息,还可以以路网为依托,形成周边环境信息,乃至对道路上的车辆的驾驶行为,也能形成一套数据库。
如果说以上的太虚,那么说点实际的:
如果你用过各类地图软件,就会知道现在的实时交通信息只能用红黄线表示,并且永远只能在堵上了才能获知情况。而极奥可以通过众包视频中捕捉到的道路上的标志物:如施工工牌、警示路障或者是遭到损毁的车等物体,分析出哪条路被封了或者不能行驶,实时地对道路状态进行更新,提前向驾驶员发出拥堵的预警。
四、自动驾驶缺便宜的激光雷达
激光雷达对自动驾驶的重要性不言而喻,谷歌、百度双双选择了激光雷达作为自动驾驶车的主要传感器,还都用了64线的激光雷达。
而固态激光雷达厂商Quanergy中国区总经理汤劲松一上台就怼了64线的激光雷达,因为太贵了。没错,Velodyne的64线激光雷达是很贵,一个要接近7万美金。
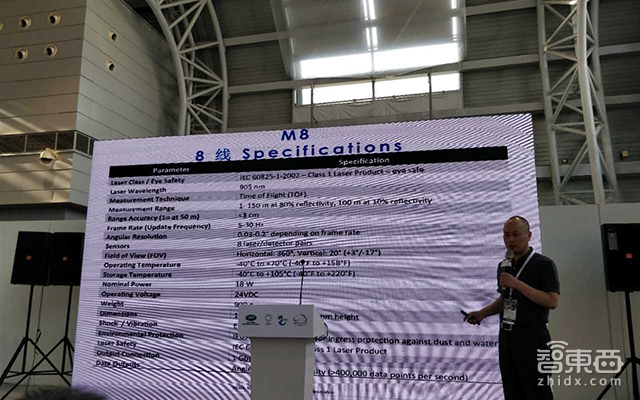
(汤劲松)
汤劲松称,激光雷达的商用化的关键路径在于四点:
1、可靠性要满足车辆级安全要求;
2、成本要足够低;
3、低重量、低功耗;
4、性能还不能太差。
而Quanergy拿出的8线激光雷达M8基本符合前三个要求,耐用、不贵,也比较小巧。对于第四个要求,汤劲松称,在实际使用中,尤其在探测距离拉远时,Quanergy 8线激光雷达采集的点云效果与高线束激光雷达(64线版)并没有想象中那么大。同时,由于低线束固态激光雷达的成本比较低,还可以通过多台激光雷达的同时使用来提高探测精度,成本也不会提高太多。
联合使用较便宜的低线束激光雷达组成高线束的探测效果正在逐渐流行,自动驾驶初创Drive.ai以及福特的自动驾驶车都用了这种方案。
不过汤劲松或许是出于对“商业化”的理解,并没有提到Quanergy正在攻关的固态激光雷达,这种雷达比M8更加便宜,可以到达一百美元级别,量产后的市场前景不可估量。也因为这个原因,固态激光雷达正在成为自动驾驶零部件供应商们追逐的一个热门领域,上周有两家激光雷达厂商Innoviz,以及LeddarTech都收获了高额投资。
不过,正如汤劲松或许在顾虑的,能满足上述四点要求的固态激光雷达暂时还不具备量产能力,其实际应用时间,或许要到明年。
结语:降成本是智能驾驶绕不过的山
从这一论坛可以看出,智能驾驶的相关从业者们,虽然各自身怀绝技,但再高大上的技术,要走向实际应用,最终还是需要让消费者感受到“物美价廉”。
换句话说,智能驾驶的竞争赛道上,在性能与成本上最先找到最佳平衡点的公司,更有可能胜出。