








⻋东⻄(公众号:chedongxi)
作者 | 明成
编辑 | Juice
车东西12月8日消息,日前,自动驾驶前装企业Nullmax(纽劢科技)在北京举办了“N友记”媒体活动,创始人兼CEO、CTO徐雷在“N友记”媒体沙龙上介绍了其对自动驾驶产品的思考,企业发展成果和企业对未来的发展规划,纽劢科技首席科学家成二康介绍了企业当前的技术成果和未来技术发展方向。
在企业情况和发展层面,徐雷提到,纽劢科技在自动驾驶感知、规划、控制等多个领域具备自主研发能力,不依赖第三方方案,包括视觉感知和中间件系统等。而且企业能针对不同价位的车型提供有竞争力的方案,还具备行泊一体方案。目前企业已经和奇瑞、上汽等中国车厂以及海外的Tier1合作,明年将重点发力海外市场。
▲企业发展情况
在技术方面,成二康介绍企业目前推出了纯视觉做高精定位的技术,包括纯视觉定位、零成本标注数据、稀疏的BEV等,而且可以将新技术落地到不同芯片上,还能支持不同车企的传感器配置定制。在技术发展方向上,成二康提出大模型是下一代技术的发展思路,他还提到,要把planning学好,需要真正去理解人的驾驶行为。这需要去构建一个更好的闭环的系统,能够更好地学习人类的驾驶环境,才能间接实现更高级的自动驾驶。
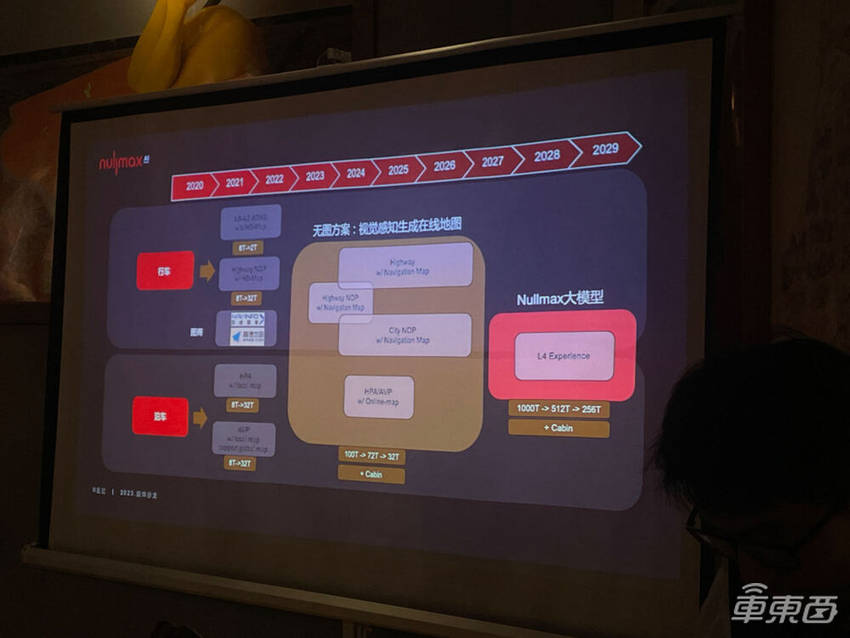
自研各层级自动驾驶方案、域融合方案、纯视觉城市NOA方案、大模型技术方向,纽劢科技展示了自己近年来的发展成果和未来技术发展方向。他们正在自动驾驶行业发展趋势中,一步一步地将自己的自动驾驶方案推向更高水平和层次。
一、自研自动驾驶方案 行泊一体低价方案都有
在提到对自动驾驶产品落地的思考时,徐雷指出,纽劢科技的自动驾驶产品或者说系统,并不只是服务中国的客户,也不只是服务中国车厂的出海车型,而是整个系统可以面向全球的需求。
▲企业背景
徐雷认为,智能驾驶本质上是从场景驱动,来设计实现商业化应用。其中两个比较大的市场一个是前装的乘用车市场,做ADAS,提供L2或者L3、L4的类似体验。还有一个比较大的应用市场,就是真正的无人化,比如Robotaxi、Robotruck,还有一些限定场景的,比如说矿、港口等。
在介绍企业特点时,徐雷提到,纽劢科技在自动驾驶感知、规划、控制等多个领域具备自主研发能力,不依赖第三方方案,包括视觉感知和中间件系统等。
不同价位的车型有不同的硬件成本要求,纽劢科技可以针对不同价位的车型打造有竞争力的方案。
除了自研自动驾驶、打造有竞争力的智驾方案之外,纽劢科技在这几年还做了很多没法体现在车上的事。
一是企业打造了基于云端基础设施的数据驱动成长系统,包括自研的数据标注的工具和高效的前端支撑工具,可以加强车辆OTA升级能力和算法迭代效率。
二是企业在很早期就提出了行泊一体的概念,通过基于单一芯片的一套方案实现行车和泊车功能,充分发挥传感器的能力和芯片算力。
三是企业积极研究新的架构和算法,推出基于Transformer的BEV方案,并在量产车型上部署。通过机器学习优先的算法解决传统方案的一些问题。
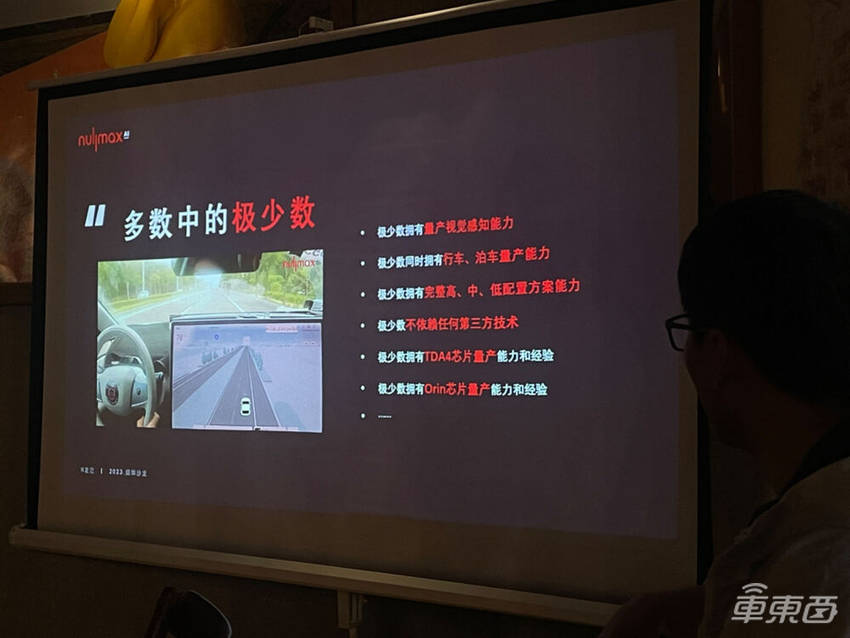
▲企业实力
徐雷指出,纽劢科技是少数具备量产级别前向视觉感知能力的公司,能在低算力平台上实现量产级别的行车感知;其他公司可能只具备一些行车或泊车能力,而纽劢科技能够同时具备行车和泊车能力。我们在各种算力平台上都有自己的方案,从最低2T的算力水平,到几百T的算力水平,企业都可以通过软件平台化的产品开发方式实现。
此外,他还提到,纽劢科技是一家做产品的公司,智能驾驶是一个产品,需要嵌入式平台作为载体,在异构计算平台上部署系统时,算法的先进性和对芯片平台的理解同样重要。
二、目前已和多家Tier 1合作 明年发力海外市场
在提到公司近年发展时,徐雷提到,近年来,公司在自动驾驶领域取得了很多进展,包括开发了基于TDA4平台的行泊一体系统,实现了高速NOA和记忆泊车等功能,并将与TI合作展示了一套新的行车系统。
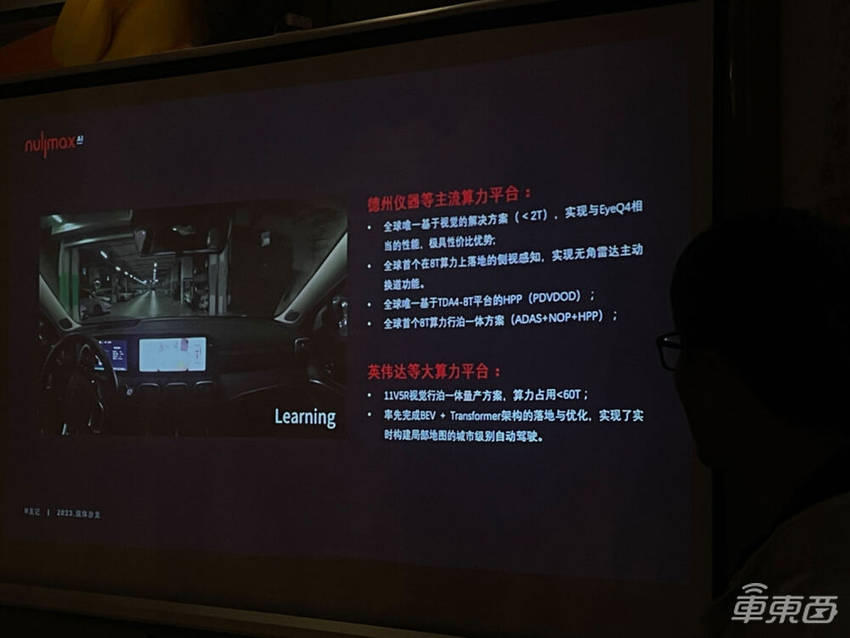
▲主要平台
公司的目标不仅是满足国内客户的需求,还希望拓展海外市场,特别是那些受法规驱动的市场。徐雷指出,纽劢科技的方案具有功能安全性和成熟度,同时在中低算力和大算力平台上都具有优势,能够为不同级别的车型提供量身定制的解决方案。同时,纽劢科技相信无人驾驶的实现是可能的,纽劢科技现有的技术上也足够支持许多产品的落地和普及化。
在技术方面,徐雷提到,纽劢科技不仅在车端打造了一套自动驾驶软件架构,还在云端建立了数据驱动的成长系统。纽劢科技的方案包括多种配置,从单摄像头方案到基于算力平台的全场景解决方案,如高速NOA和行泊一体。纽劢科技的平台化方案能够适应不同车型的需求,并提供具备功能安全等级的芯片方案。在场景上纽劢科技注重高速场景和城市场景的开发,并采用纯视觉的方式进行城市NOA的实现。
▲企业合作进度
合作伙伴方面,纽劢科技目前已经与多个合作伙伴展开了量产项目的合作,其中包括奇瑞、上汽等中国车厂以及海外的Tier1合作伙伴。徐雷指出:“纽劢科技致力于建立健康的商业模式,并已收到了这些项目的开发费用。我们与合作伙伴分享我们对芯片、软件和核心传感器的理解和能力,并共同打造有竞争力的解决方案,以服务更多的客户。另外一点就是,我们明年非常重要的一点发力海外市场。”
三、已实现纯视觉定位 大模型是下一代技术的思路
徐雷介绍完公司相关情况后,纽劢科技首席科学家成二康介绍了企业当前的技术成果。
成二康介绍道,公司目前在 IROS2021上推出了纯视觉做高精定位的技术,包括纯视觉定位、零成本标注数据、稀疏的BEV等,而且可以将新技术落地到不同芯片上,包括TI、英伟达和国产芯片,并适配不同车企的定制需求。
而且,公司还可以通过平台化技术架构设计和自研中间件,适配不同芯片和产品,支持不同车企的传感器配置定制。

▲BEV-AI技术
而BEV-AI技术可以支持CNN和Transformer的混合使用,以及将二维空间的优势引入三维空间目标检测中。目前公司的BEV-AI可以支持感知和Planning,支持不同算力的计算芯片,通过自动标注工具链提高自动化程度。
在提到新一代技术研发情况时,成二康提到,大模型是下一代技术的思路,有三个支柱,分别是驾驶环境的世界模型,Foundation Model + Prompt Learning,以及planning相关的工作。

▲未来规划
Foundation Model + 提示学习可以通过不同的提示完成不同任务的交付,可以结合生成式理解驾驶环境,并且在量产项目中可以生成各种静态场景数据。
Prompt Learning能补充Foundation Model,满足不同任务的需求;支撑未来产品形态的技术架构设计。
planning则需要真正去理解人的驾驶行为。这需要去构建一个更好的闭环的系统,能够更好地学习人类的驾驶环境,才能间接实现更高级的自动驾驶。
成二康提到:“我们从一些伙伴或者朋友渠道了解到的情况是,现在大家在做的很多城市NOA还是以rule-based(基于规则)为主,我们希望能够通过更多的数据,哪怕是低质量的驾驶数据的收集,能够完成更好的planning。”
结语:纽劢科技走向自动驾驶深水区
纽劢科技目前的自动驾驶方案和未来发展方向上都在时代发展的浪潮中,自研各自动驾驶方案可面对不同层级客户需求,还有域融合方案,目前已经和国内外Tier 1有合作明年还将出海发展。而面向未来,他们拿出了纯视觉城市NOA路线,还要将大模型作为未来的技术方向。可以说,纽劢科技正在将自己的自动驾驶技术推向更高水平。

