车东西(公众号:chedongxi)
作者 | 小崔
编辑 | Juice
什么样的智能驾驶方案才最符合当下汽车市场的要求?
关于这个问题,行业内目前有两个答案,一是采用昂贵的软硬件,让量产车实现高阶智能驾驶,如高速NOA和城市NOA;另一个则是将硬件性能发挥到极致,通过较低的成本让车辆具备辅助驾驶能力。
这也可以被视为两条不同的细分路径,而这两条路径也并没有对错之分,只是代表了不同玩家对于市场的思考。
不过站在当下的时间节点来看,高阶辅助驾驶如城市NOA的落地进展并不算快,而更被消费者看重的10~20万市场也还没有完成辅助驾驶的普及。
更值得注意的是,今年以来,汽车市场非常卷,车企都在降价促销,这样一来,辅助驾驶的成本就更加敏感了。因此,目前整个汽车行业亟待性价比更高的辅助驾驶解决方案打开局面。
这一趋势下,一些智能驾驶方案供应商们选择在传感器上下功夫——减少雷达数量,从nR1V到1R1V,再到单视觉方案,力争将硬件成本降到最低。
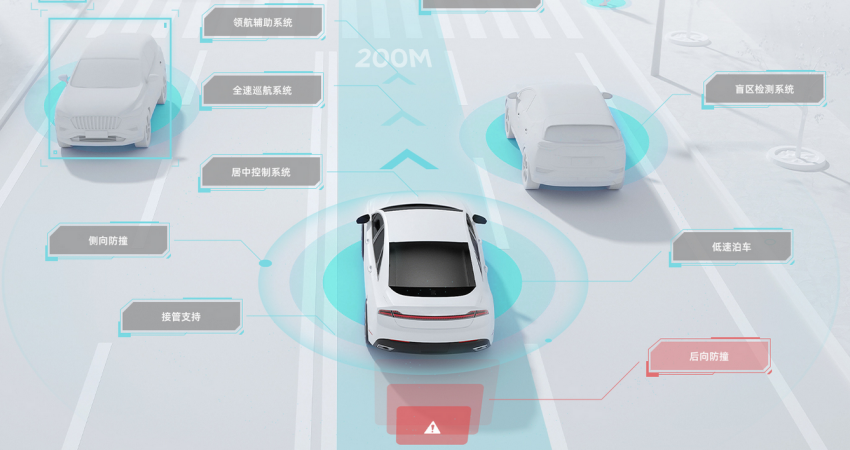
日前,智驾科技MAXIEYE发布了牧童MonoToGo™解决方案,仅采用一颗摄像头就能够实现L2级辅助驾驶,并且满足CNCAP2021版本和2024版本主动安全五星+评分要求,AEB误触发率远优于行业平均水准。

▲牧童MonoToGo™解决方案
可以说,这一方案虽然在硬件上做了取舍,但是其表现力并没有打折扣。
那么,仅凭一个单目摄像头,牧童MonoToGo™单视觉L2解决方案是如何应对各种复杂场景的呢?单视觉方案会是未来智能驾驶行业的确定性方向吗?车东西与MAXIEYE首席运营官杨腾飞进行了深入交流,并从中找到了答案。
一、成本重要性提升 单视觉方案备受关注
在汽车智能化大趋势的要求下,辅助驾驶能力正在成为车企重要的竞争力之一。因此智能驾驶领域也非常之卷,一部分玩家在卷高阶智能驾驶,另一部分玩家则在卷性价比。
尽管如此,智能驾驶的普及仍然任重道远。去年,国内L2智能驾驶方案渗透率首度超过30%,这意味着平均每10辆车里面就有3辆车搭载了L2智能驾驶系统,但市场上至少还有七成的车辆没有采用L2级智能驾驶方案。
另一方面,今年兴起的车圈价格战却给智能驾驶的普及带来了成本上的难题。价格战影响下,车企对于成本的要求更加敏感,对于占市场主体的10~20万区间的车型来说,既想要降低成本,又想要通过增加智能驾驶功能提升产品竞争力,这对车企来说几乎是进退两难。
这种情况下,不少车企开始在功能和成本之间寻找平衡点,性价比也因此成为了关键词,不少1R1V方案开始上车。
虽然1V1R的方案的成本已经比较低了,但仍然没有办法做到快速普及。于是,一些玩家还在进一步思考,1V1R的方案是否已经触摸到了行业的底部?是否还有能力更进一步?
从第一性原理来看,1V1R确实还有下探的空间,只通过一颗摄像头来实现辅助驾驶自然是最合理的方式。
而目前也有玩家已经在这方面进行了布局,不仅拿出了完整的方案,而且市占率还在持续上升,公开数据显示,自主品牌近三年来单视觉L2配置率逐年提升,并有望取代1R1V的部分市场份额。
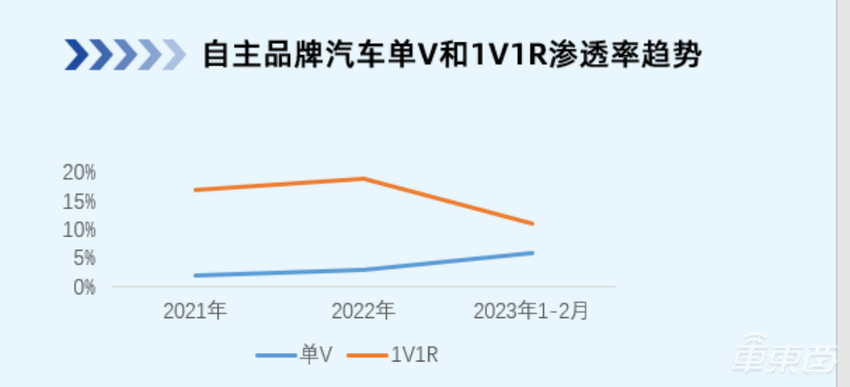
▲自主品牌汽车单视觉方案和1V1R渗透率趋势
此前,市场上只有Mobileye和地平线拿出了单目视觉感知方案。而在日前,MAXIEYE推出牧童MonoToGo™,成为了第三家推出量产和底层自研的单视觉L2级方案的玩家。
至此也产生了一个新的问题,与1R1V方案相比,市面上一些单视觉解决方案在测距和测速的精度上有所下降,这也是整车厂对单视觉L2方案主要的担忧和痛点。
基于数据支撑,MAXIEYE的牧童MonoToGo™在实车测试场测评中,达到CNCAP2021版本和2024版本主动安全五星+评分要求,测评数据符合E-NCAP 2023主动安全五星要求。
也就是说,MAXIEYE用较低的成本做出了足够好用的方案。
那么,智驾科技是怎么做到的呢?
二、软硬件同步发力 推出多项核心算法
为了实现这一成绩,MAXIEYE在软硬件两方面都下了很多功夫。
牧童MonoToGo™在复杂场景下的目标识别准确,离不开MAXIEYE的底层感知自研和数据迭代能力的加持。
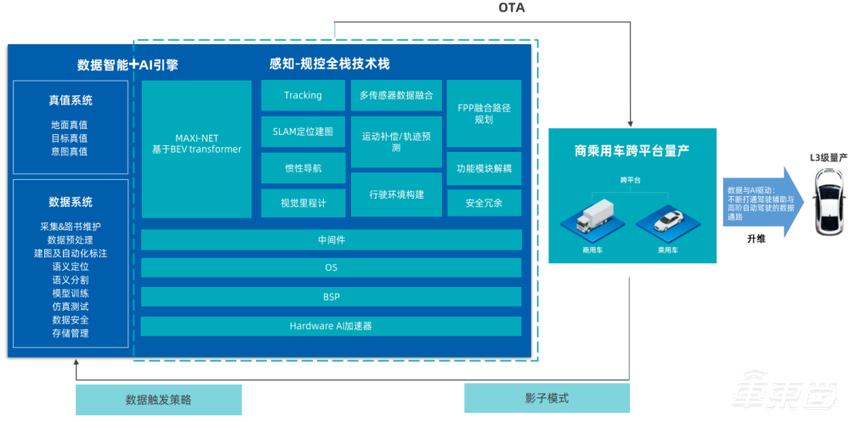
▲智驾科技MAXIEYE全栈技术布局
MAXIEYE自研了基于MAXI-NET深度学习网络的感知到规控全栈技术链,通过系统软件之间的联合优化,高效实现系统最优。
另外,MAXIEYE在牧童MonoToGo™中采用了双网络冗余技术,在目标识别的时候会通过两个神经网络去确认目标。
其中一个神经网络解决目标检测问题;另一个神经网络主要是解决目标与环境的关系问题。经过两个神经网络综合确认后,牧童MonoToGo™基本可以准确无误地识别目标,从而保证车辆安全行驶。
值得注意的是,MAXIEYE还采用了创新性4D视觉算法对速度和距离这两个重要参数进行特殊处理,基于双网络冗余校验,在提升准确率同时,针对性优化了颠簸路况、俯仰路况等复杂场景。
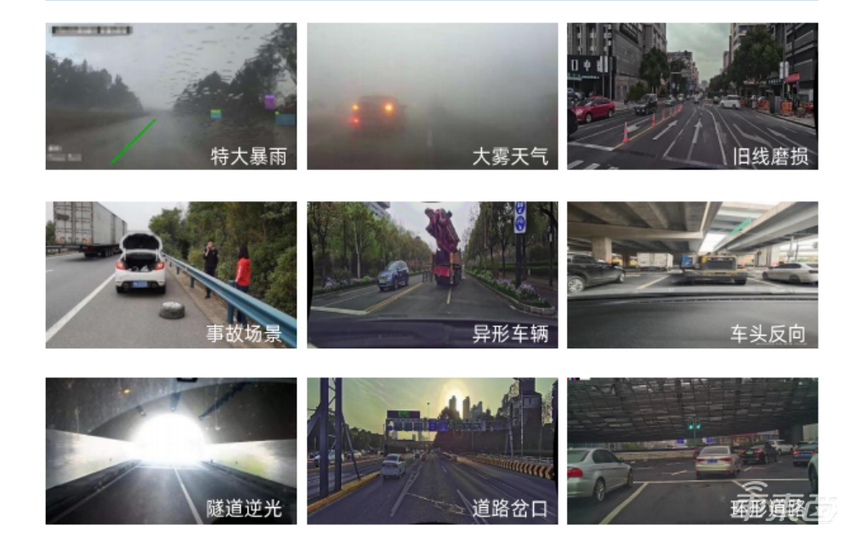
▲corner case场景
基于跨平台嵌入式开发能力,MAXIEYE在硬件方案上会更加灵活,可以有更多跨平台芯片选择的自由,MAXIEYE可以选择某个细分领域最适合自己的芯片,然后基于SOA底层软件架构设计实现高效的平台化移植。
据悉,此次发布的第一代牧童MonoToGo™采用安霸CV22芯片,水平FOV参数100°,目标探测距离最远支持200m,针对性优化了夜间/阴雨/光线变化等场景适应性,集成MAXI-NET深度学习网络模型,支持十余种目标属性感知和预测,针对单视觉应用强化了速度/航向角等属性估计的性能,支持4D感知网络,可满足SAE J3016TM定义的自动驾驶等级中的L0-L2级全功能。

▲MonoToGo™ L2功能
三、数据闭环是关键 可持续迭代升级
支持数据全流程闭环,是牧童在单视觉产品定义中最大的功能亮点之一。
MAXIEYE自2021年起搭建基于量产系统的数据智能体系,支持全流程场景复现和数据闭环,该体系支持数十种事件触发视频回传机制,可以持续通过数据驱动实现算法迭代升级。
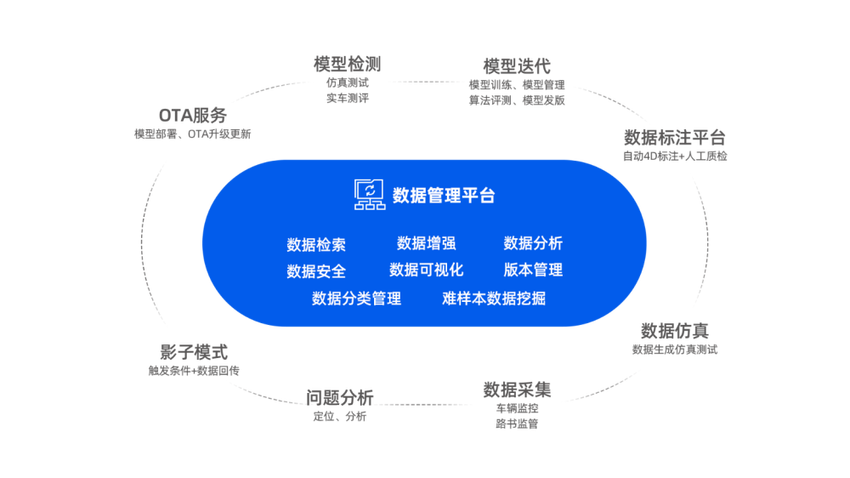
▲MAXIEYE数据智能体系
那么,其工作的具体流程是怎样的呢?我们以AEB的误制动为例。
事实上,AEB误制动的场景非常多,几乎无法穷举,只有在系统投放市场使用后,经过大量的实际路况应用才能收集到。
每当已量产的系统产品发生误制动或其他问题场景时,MAXIEYE都会将在车端脱敏处理过的场景信息和处理结果回传回来。
值得关注的是,与市面上其他单视觉系统相比,牧童MonoToGo™内部含有一个视频解码芯片,能够更完整和真实地还原AEB发生前后几秒的场景,这也突破了既往行业仅支持回传单张图片的壁垒,可良好解决问题的复现分析。
另外,这个视频解码芯片支持视频记录集成复用,对于车厂或者是终端用户来说,硬件成本基本上没有增加,但是却增加了一个视频记录的软件功能。
数据回传之后,研究人员则会去分析定位是哪一个环节出现了问题,如系统计算的问题,或是此前没有收集到的目标信息。
如果是系统的计算能力出现故障,那么研究人员会有针对性地进行修复和备案,如果出现了此前未收集到的目标信息,那么该目标信息将会被添加到系统之中,确保目标下一次出现时能够准确识别。
除此之外,MAXIEYE的影子模式也可以促进数据闭环。
可以通过量产方案的影子模式对单视觉和1R1V两种方案进行演练。
如果单视觉方案的处理结果与1R1V方案的处理结果相同,那说明单视觉方案在这些场景中表现非常好,如果不同,MAXIEYE便会对两种方案的不同处理结果进行记录并回传,通过比对完成训练。

▲量产系统数据闭环案例
由此可见,MAXIEYE在数据闭环方面做了很多布局,而越来越多的数据也能够促进产品的持续迭代。官方数据显示,MAXIEYE量产系统积累场景数据已经突破了2亿公里,在行业内已经排在了前列。
得益于数据闭环能力,牧童MonoToGo™解决方案的OTA更新速度最快可达到一季度一次。
整体上来看,智驾科技MAXIEYE已经完成了全栈技术布局,这样做的好处,除了可以实现技术自控,另一方面也可以有效降低不同模块调校和误差叠加等开发成本。
一般情况下,当感知模块出现问题时,方案供应商不仅需要通过优化感知本身去解决,还需要靠规控端去做调整。如果感知和规控都是自己研发,那么两者的兼容问题就可以有效在内部快速解决,感知和规控可以进行深入耦合,取长补短,互相弥补,合作研发也就更紧密。
正是这样的前期布局,MAXIEYE在保证了核心竞争力的同时,也让商业化方面的更多尝试成为了可能。
四、牧童MonoToGo™方案或将促进高阶智驾落地
目前,智能驾驶标准化产品进入价格内卷阶段,这正在倒逼车企和方案商积极布局降本增效。单视觉方案的极致成本下探和创新功能加成,是应对L2规模化市场需求的一份答卷。
另外,如何理解单视觉方案对高阶智能驾驶技术产生促进作用呢?
当下,高阶智能驾驶的落地速度不如预期,最大的问题在于对场景的覆盖率不足,算法性能打磨和体验优化仍待提升。
基于诸如单视觉L2等成本极致化的数据闭环方案部署,所谓“低阶赋能高阶”的路径有望被打通。具体而言,作为业内唯一支持量产单视觉L2部署视频数据闭环的方案提供商,MAXIEYE部署了完整的数据全流程闭环,以及基于视频流实现vSLAM关键场景构建的底层技术架构。
数据闭环的价值不仅针对量产的当前系统支持功能迭代,还可针对性面向十字路口、匝道口等高阶智能驾驶的痛点场景建立知识库积累,以实现对内自迭代、对外促升级的数据驱动双闭环。
不论是科技普惠,抑或是铺垫高阶的新打法,牧童MonoToGo™都在相对标准化的L2市场给出了新的定义。所谓行业内卷,不健康的现象长期而言只是暂时的,排除杂音,回归商业本质,解决痛点和用户体验,或许才是唯一难但正确的“捷径”。