车东西(公众号:chedongxi)
作者 | Juice
编辑 | 晓寒
域控制器对于自动驾驶来说就像“大脑”,其重要性非常明显。
长久以来,自动驾驶域控制器都由一些固定的企业生产,自动驾驶公司主要在软件层面发力,不断完善软件算法。
而小马智行则并没有沿袭这一惯例,在很早之前就选择了自研硬件产品,比如在第五代自动驾驶系统PonyAlpha X上,就使用了自研的红绿灯识别摄像头PIDC(Pony In-House Designed Camera)和自研的计算单元。

▲小马智行自动驾驶车辆
就在最近,小马智行更是正式对外交付了基于NVIDIA DRIVE Hyperion计算架构及DRIVE Orin芯片自研的自动驾驶域控制器ADC(Autonomous Driving Controller)样品,并且将会在今年第四季度大规模量产交付。
凭着该产品的顺利交付,小马智行也成为了行业内首批基于一个或多个NVIDIA DRIVE Orin及车规级NVIDIA Ampere架构GPU设计出不同配置域控制器产品组合的自动驾驶技术公司。
该产品也将会推动更多的乘用车和商用车实现自动驾驶,促进自动驾驶技术的进一步落地。
那么这一产品具体性能究竟如何?和其他同类产品相比又有哪些优势呢?
一、正式交付自动驾驶域控制器 基于英伟达Orin芯片打造
据了解,小马智行的自动驾驶域控制共分为两个版本,其中单Orin版本的算力为254TOPS,而双Orin版本的算力为508TOPS。
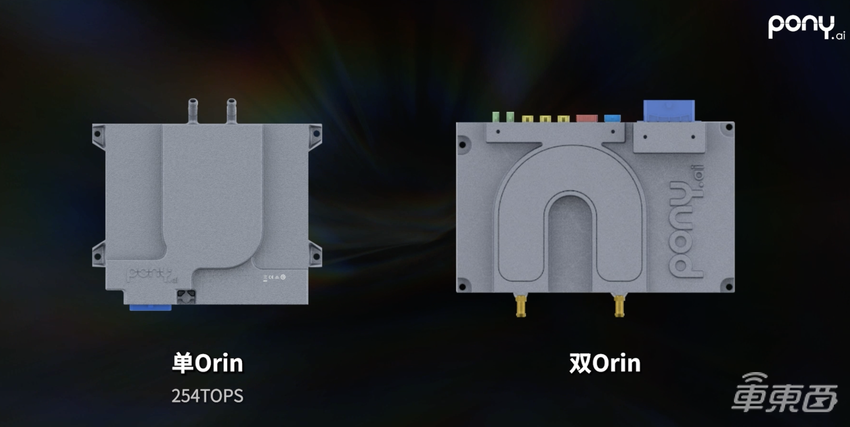
▲小马智行自研的自动驾驶域控制器
虽然近日才正式向客户交付样品,但小马智行在今年1月份就开启了基于英伟达Orin的自动驾驶路测,并持续优化软件表现,实现超低时延的实时运转。
而小马智行也成为了行业内首家使用Orin芯片域控制器顺利完成典型高速场景以及城区交通场景行驶的自动驾驶公司。
此次公布路测视频中的自动驾驶车辆采用了单Orin版本的域控制器,算力为254TOPS,严格按照行业规范进行设计、验证和生产,完全符合车规。此外,小马智行还提供了底层软件、中间件和上层算法。
测试车辆前向采用了激光雷达、摄像头和毫米波雷达进行多传感器融合感知,侧向和后向采用了摄像头和毫米波雷达融合的视觉感知技术。

▲小马智行自动驾驶测试车传感器配置
搭载了小马智行自动驾驶域控制的车辆可以独立完成自动驶入匝道并通过ETC收费口进入高速的操作,车辆会自动拉开和前车距离,并且在检测到前方横杆打开之后才会加速驶入高速。
在高速路段,车辆可以会在合适的时候自动变道,如果左侧车道线为实线,车辆会持续等到车道线为虚线时变道超越前车。在行驶过程中,车辆会主动选择效率比较高的车道行驶。

▲小马智行自动驾驶车辆主动超越前方慢车
车辆还可以根据地图信息主动驶入匝道,完成变更高速路段的操作。如果检测到前方道路情况复杂,车辆会提前转到最右侧车道,避免错过匝道口。在整个高速行驶过程中,即使有前方车辆进行加塞,小马智行的自动驾驶系统也能很好应对。
而在完成了高速路段的行驶之后,车辆还可以自己通过ETC收费口驶出高速。

▲小马智行自动驾驶车辆驶出高速
在城区道路上,对于行人和非机动车的识别非常重要,小马智行的自动驾驶车辆在行驶过程中,均可以很好地识别行人和自行车、电瓶车等交通工具。
即使在难度最高的无保护左转路口,小马智行的自动驾驶车辆会先选择往前开,然后在根据道路情况选择合适的左拐时机,整个操作逻辑和人类驾驶非常一致。

▲小马智行自动驾驶车辆经过无保护左转路口
不难发现,小马智行的自动驾驶车辆可以在繁忙的城市公开道路以及高快速路实现多种智能驾驶功能,包括:拥堵路段跟车并线、根据导航自主变道、变道超车/绕行、路口掉头、信号灯识别或通过无灯路口、施工及事故区域绕行、VRU(交通弱势群体)识别与处理(包含混流道路行驶)、匝道通行及汇入主路、自动通过ETC收费站等。
整个过程基本上已经实现了点到点的自动驾驶,并且全程没有人工接管,这既反映了小马智行自动驾驶技术的优秀,也反映了小马智行自研的域控制器的稳定性。
二、测试里程已超1300万公里 更懂硬件设计
从上面的具体实践中也可以找到小马智行下场做自动驾驶域控制器的原因。
相比于市面上其他的域控制器提供商,小马智行此前已经做了大量的自动驾驶测试,看到了一些软硬件非常底层深度优化的需求,而且小马智行认为,好的软件系统也离不开优秀的硬件配合。
小马智行一直坚持软硬件同步发力,对软硬件的思考都非常深入,所以自己研发域控制器更能够满足量产自动驾驶功能的场景。
更重要的是,小马智行此前也曾多次参与过硬件的研发,也有非常深厚的硬件研发基础。
小马智行第五代自动驾驶系统PonyAlpha X就使用了小马智行自己研发的红绿灯识别摄像头PIDC(Pony In-House Designed Camera)和自研的计算单元。

▲小马智行自动驾驶车辆可以识别红绿灯复杂场景
对于很多自动驾驶汽车来说,红绿灯识别还存在一定的难度,而小马智行根据自己的经验针对性处理了信号灯LED频闪的问题,提升了识别率和准确率,使得小马智行的自动驾驶系统可以顺利应对各种复杂的路口场景。
而小马智行研发的PIDC在防水、散热、信号连接、安装稳固等方面表现得都非常好,维护频次非常低。
在第五代自动驾驶系统上,小马智行的软硬件团队共同合作,通过高度定制的异构计算系统,还打造了充分满足小马智行应用软件需求并同时兼顾高性能、高效率和高可靠性的L4无人驾驶中央车载计算平台。
不难发现,小马智行并不像其他自动驾驶公司那般只注重软件,而是在硬件方面也有很深的技术积累。
与其他硬件提供商相比,小马智行已经积累了超过1300万公里的自动驾驶测试里程,单车自动驾驶效率也非常高,平均达到了98%左右。

▲小马智行的无人驾驶系统进行了大量的测试
正因如此,小马智行能够看到自动驾驶第一手的需求。对于产品的体型设计、成本考虑都更了解,这也是小马智行坚持软硬件同步布局的底气。
小马智行懂软件也更懂硬件,所以在开发完整的硬件系统上效率更高,最新发布的自动驾驶域控制器则从去年5月份开始和英伟达合作开发,开发过程非常顺利,今年1月份就已经开始路测了。
总的来看,硬件开发也是小马智行的传统之一,而且凭借着对于软件和自动驾驶的足够了解,小马智行在硬件开发方面也非常得心应手。
三、小马智行坚持两条腿走路 将推动自动驾驶快速普及
自动驾驶已经成为汽车新四化时代最重要的技术方向之一,乘用车领域和商用车领域都在掀起一场自动驾驶改革。
而在自动驾驶方面,硬件和软件都在不断地迭代更新,自动驾驶公司会不断迭代自己的软件算法,而硬件供应商也会不断更新自己的硬件产品。对于自动驾驶来说,软硬件同等重要。
小马智行从成立之初就认识到了这一点,很早就参与进了自动驾驶硬件的研发当中,根据自己对于自动驾驶的深刻理解,做出了一些非常实用的硬件产品。此次推出的自动驾驶域控制就是自动驾驶产业中非常重要的产品,基本上可以视为自动驾驶的大脑。
小马智行表示,不会将产品定义为某类产品特需的产品,而是想要帮助自动驾驶实现量产。

▲小马智行自研的自动驾驶域控制器
从展示的路测视频来看,单颗Orin芯片版本的域控制器已经可以在快高速、城区道路上实现自动驾驶了,和量产车在做的全场景NOA相似度非常高。
而这套域控制器的成本也并不算高,和市面上其他的域控相比,成本非常有竞争力。这也说明,小马智行的域控制器也能够帮助量产车快速实现自动驾驶。
另一方面,小马智行在L4级自动驾驶方面的积累也非常深厚,无论在乘用车领域还是商用车领域都有很强的技术积累。
对于小马智行来说,硬件产品的不断推出也能够完善其产品矩阵,未来既可以通过无人驾驶出租车实现盈利,也可以外供自动驾驶解决方案和硬件,能够为商业化创造更多可能。
整体来看,小马智行的域控制器无论是性能还是可靠性都非常好,可以帮助车企或自动驾驶企业早日实现自动驾驶产品的落地。

▲小马智行自动驾驶车辆
结语:小马智行再迎重要里程碑
作为国内头部的自动驾驶玩家,小马智行对于自动驾驶软硬件的理解更加深刻,其自动驾驶域控制器也能显著帮助车企提升自动驾驶能力,确保在下一阶段的竞争中不掉队。
此外,这一自动驾驶域控制器的推出标志着小马智行的产品阵容又有新进展,同时这一产品也为小马智行的商业化进展提供了新的路径。
随着今年第四季度开始大规模量产交付,小马智行也将会再次迎来新的里程碑。