








车东西(公众号:chedongxi)
作者 | 晓寒
编辑 | 肖涵
国内最热的新造车公司蔚来,近日也出现了一起自动驾驶(L2级)相关的事故。
就在刚刚过去的一月底,1台蔚来ES8在高速公路上开启L2级自动驾驶功能(NOP,领航辅助)时,先后撞上了一名男子和一台五菱宏光,两车严重受损,零件散落一地。

▲事故画面
蔚来ES8全车搭载了25个传感器,是目前全球少数几款拥有自动导航辅助这种高级L2级自动驾驶功能的车型,蔚来官方更是表示自己具有全栈自动驾驶能力。
但就是在这种硬件配置和能力之下,为何ES8在一条空旷的高速路上却躲不了一个行人和一台车呢?官方给车东西的回复大意是车速过高,AEB系统不在工作范围,无法避免,或减缓碰撞。

▲ES8事故现场(图源@跑不动的小狐狸)
但显然更本质的原因是NOP系统没有及时发现前方障碍物,最终导致了碰撞。车东西向蔚来汽车方面询问了更为细节的事故原因,但对方表示目前不方便回答。
事故的原因依然存疑。
为了弄明白事故背后到底发生了什么,以及可能存在的技术原因,车东西也与来自车企、Tier1企业、自动驾驶公司、传感器公司的多位专家和高管进行了长时间的交流后,找到了几个可能的答案。
一、写在前面:事故责任在驾驶员
蔚来汽车方面向车东西确认,事故发生时,这台ES8确认正在开启NOP(Navigate on Pilot)领航辅助功能。
根据SAE和工信部《汽车驾驶自动化分级》标准,NOP是一套标准的L2级自动驾驶系统,工作时车辆在单一车道居中向前行驶,根据前方障碍车辆自行控制加减速,并可自行变道超车、下匝道。
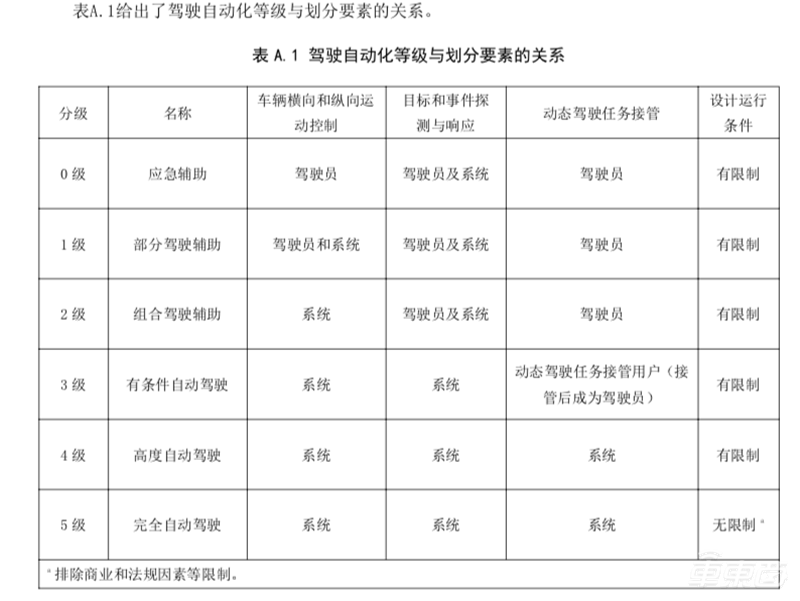
▲工信部驾驶自动化等级与划分要素关系图示
L2级自动驾驶系统有三个关键点:
(1)系统有严格的工作条件,超过工作条件便会失效或退出。
(2)系统执行自动化操作时,驾驶员需要始终监测路况,并准备随时接管。
(3)最终的驾驶责任在驾驶员。
也就是说,如果超出了系统工作范畴,驾驶员应该及时接管。如若没有接管而产生的事故,责任在驾驶员。
蔚来官方在NOP的用户手册里明确强调:
(1)NOP无法对人、动物、交通灯及静态障碍物(如高速收费站、路障、三角警示牌等)做出反应。
(2)本车与前车相对速度大于50公里/小时,如前车静止或缓行,Pilot(NOP的基础功能,两者纵向控制是一套算法)存在无法刹停的风险,出现上述情况,请立即退出Pilot,切勿在上述情况尝试Pilot对静止车辆刹停或跟停前车。
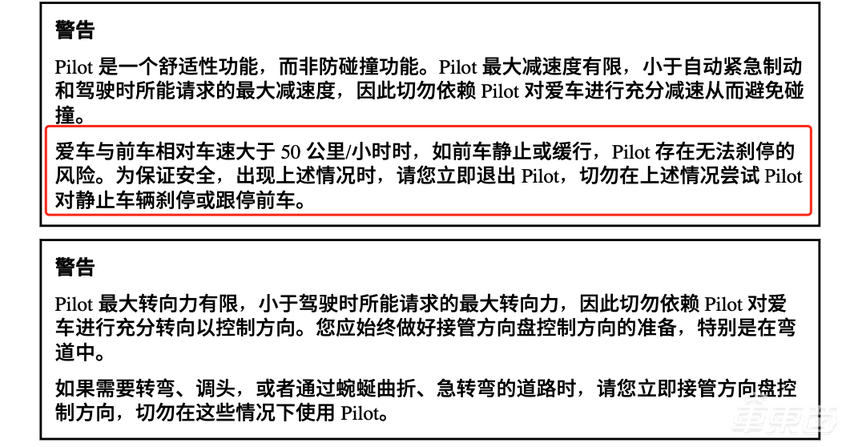
很明显,这次事故的场景,刚好把蔚来NOP/Pilot手册中的两个警示条款都遇到了,一个是行人,一个是静止车辆。
属于驾驶员没有在特殊情况下接管车辆,最终造成了事故,责任在驾驶员,前方那个五菱宏光在高速超车道停车本身也属于违规行为。

▲ES8事故现场(图源@跑不动的小狐狸)
当然,对专注于自动驾驶技术报道的车东西来说,我们更想弄清楚,号称有全栈自动驾驶研发能力,全球继特斯拉NOA(Navigate on Autipilot)后第二个推出类似功能(NOP)的蔚来,为什么无法完美解决静止车辆的避让问题,这次事故的潜在原因有哪些?背后又面临着哪些技术挑战?
注意,以下内容仅仅属于技术分析与探讨,最终事故原因以交管部门和蔚来汽车出具的报告为准。
二、蔚来的解释:NOP刹不住,AEB没启动
在事故发生后,车东西与蔚来公关部取得了联系,对方给出了如下回复:
根据自动辅助驾驶系统的设计,无论是否开启NOP,当系统检测到机动车、行人时,如果车速低于8公里/小时或大于85公里/小时,自动紧急制动(AEB)不会启动。NOP在发现静止或低速物体时所能请求的减速度有限,会提前减速,在减速度不足时,提示驾驶员接管。
本次事故初步调查显示,车辆发生碰撞前时速超过100公里/小时,在此情况下,NOP所能请求的最大减速度已无法保持车距,车辆发出“注意保持车距”的警示,提示驾驶员接管车辆;又因为车速超出AEB可触发的车速区段,故发生该起事故时AEB没有触发。
蔚来官方的回复仅仅告知了表面原因——NOP刹不住,AEB没启动。
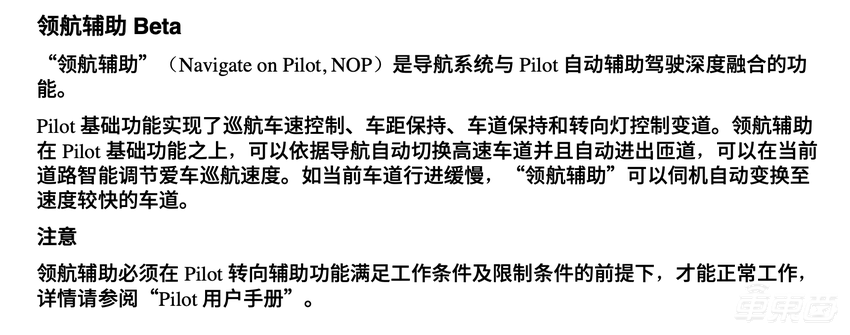 ▲蔚来NOP功能说明
▲蔚来NOP功能说明
根据业内通用做法,NOP、Pilot这类L2功能属于舒适性功能,因此系统所能够请求的减速度(就是最大刹车力度)有限。
在碰撞前最后一刻,NOP发现了前方有静止车辆,然后进行了刹车,但力度不够没刹住,就出现了碰撞事故。
NOP面对这个场景会刹不住,那么谁能起到作用呢?
答案是AEB自动紧急制动系统,但蔚来的AEB系统设计的工作范围是8-85公里/小时,而在事故发生时车速超过100公里/小时,不在工作范围,最终不幸发生了事故。
这里需要注意,目前有些车型AEB系统的工作区间上限或超过100公里/小时,甚至超过120公里/小时。蔚来的AEB如果工作范围更大,能够帮助减缓损害。
三、为什么刹不住?感知到障碍车辆太晚
在这起事故中,表面上看是NOP刹车力度不足,导致没法在最后一刻刹停这台ES8。
但从L2级自动驾驶系统背后技术后看,核心原因是感知系统没有及早发现静止车辆(躲避行人的功能蔚来没做,此处不做讨论),所以留给NOP进行刹车的时间太短了,进而出现请求的减速度不足的情况。
试想,如果在100米,或者50米的距离就已经发现了前方车辆,NOP早点开始减速不就能刹停,或是大幅减速降低碰撞伤害吗?
给个刹车数据做个参考。
蔚来ES8搭载了Brembo的高性能刹车系统,全力制动时,2吨多的SUV从100公里/小时到0的刹车距离只有33.8米。

▲小改款后的2020蔚来ES8
这个成绩不仅远超大部分普通家用SUV,更是直接能叫板性能车和超级跑车。即使NOP所能请求的刹车力度不足,刹车距离翻倍也在100米之内。
然后再看看蔚来官方的回复,“在此情况下,NOP所能请求的最大减速度已无法保持车距,车辆发出“注意保持车距”的警示,提示驾驶员接管车辆”。
翻译一下就是NOP系统发现前方有障碍车辆的时间已经太晚了,刹车也没用了。所以从技术逻辑分析,这起事故的根本原因是感知系统的“锅”。
这里再次强调,蔚来汽车已经在用户手册中注明了前方存在静止或缓行车辆,需要驾驶员接管。所以说感知系统要“背锅”,并不是说NOP存在设计缺陷,或者是蔚来汽车需要为事故承担责任。
四、25个传感器 为什么看不到一台车?
蔚来汽车方面向车东西确认,事故车辆是一台老款ES8。
根据车东西了解到的信息,老款ES8搭载了25个传感器,包括一个前向3目摄像头、5个毫米波雷达、4个环视摄像头和12个超声波雷达、一个驾驶员监测摄像头。
整个L2级自动驾驶系统使用了Mobileye目前最强的Eye Q4芯片提供算力,并且ES8在2018年发布的时候还是全球首个搭载EyeQ4的量产车。

▲蔚来ES8的感知系统
在NOP系统运作的时候,正前方主要依靠车头处的前向长距离毫米波雷达和前视摄像头进行感知。
事故车辆搭载的是博世第四代毫米波雷达中距离产品MRR(Mid Range Radar)。在ES8小改款后,该雷达换成了德尔福的雷达。

▲蔚来ES8的前雷达
摄像头的感知算法由Mobileye提供,内嵌在EyeQ4中。毫米波雷达的感知算法由博世提供,内嵌在MRR雷达的主控芯片中。
这里有一个细节需要注意,由于EyeQ4使用的是单目摄像头算法,所以蔚来虽然有三个前视摄像头,但其实只有一个摄像头参与前方感知,并没有使用双目摄像头组成的立体视觉算法。
据推测,蔚来ES8的三目摄像头一个其中一个给EyeQ4输出画面,一个用做行车记录仪,另一个用于蔚来自行采集数据,以便训练自家的算法。

▲Mobileye EyeQ4芯片
特斯拉早期的自动驾驶系统也有类似做法。就是装多个前视摄像头,其中一个给Mobileye提供画面,另外一个自己收集数据默默训练自己的感知算法。
NOP开启时,EyeQ4和MMR雷达分别输出目标感知的结果,其中后者的目标结果会传递至EyeQ4芯片上,由蔚来自主研发的融合算法对目标进行比对,在获得关键的外界感知结果后,最终计算出驾驶决策。
作为一套引入了EyeQ4芯片的L2级系统,蔚来NOP系统的基础架构来自于视觉系统,即通过摄像头识别可行驶区域,并感知外界目标,在发现需要躲避的关键目标后,再引入毫米波雷达的感知数据来精确感知目标的速度和距离,进而算出驾驶决策。
这个架构换句话来说就是视觉是主传感器,然后再用毫米波雷达进行辅助。其中视觉传感器的权重高,毫米波雷达的权重低。
在这个背景下,蔚来的NOP的感知系统没有及时发现前车,就存在这样几种情况:
1、摄像头和毫米波雷达均在最后时刻发现前车
2、摄像头始终没有发现前车,毫米波雷达最后时刻发现前车(可排除)
3、毫米波雷达始终没有发现前车,摄像头最后时刻发现前车
4、毫米波雷达较早发现前车,摄像头在最后时刻才发现前车
5、摄像头较早发现前车,毫米波雷达在最后时刻发现前车(可排除)
考虑到蔚来NOP是一套L2级系统,并且是视觉为主传感器,所以如果摄像头较早发现了前车并持续追踪,理论上会在较早位置开始减速,所以情况5可以排除。
在以视觉为主的L2级自动驾驶系统中,一般情况下如果没有视觉感知的结果,L2系统几乎仅依靠毫米波雷达的目标进行反应。
在单雷达的AEB和ACC系统中,存在仅依靠雷达进行反应的做法。但考虑到蔚来的AEB系统根本不在工作范围,所以情况2也可以基本排除。
现在我们剩下了1、3、4三种情况。
还是那句话,因为视觉是主传感器并且权重更高,所以在情况4之下,即使毫米波雷达先发现了前车,系统也会暂时不行动,需要等待摄像头的感知结果融合后再采取行动。
看到这里,其实这起事故的技术原因已经很清楚了,最关键的是视觉没有及时发现目标。
同时毫米波雷达则显得有一些奇怪,它既可能较早就发现了目标,也可较晚发现,甚至还可能根本没有发现目标。
在下一部分,我们具体聊一聊事故中到底遇到了哪些感知难题,以及毫米波雷达为什么有这么多的可能性。
五、感知难点在哪?雨天+静止车辆+特殊位置
从行车记录仪视频画面来看,事故发生时这台ES8的雨刮器正在工作,说明当时正在下雨,挡风玻璃的雨滴会对车载前视摄像头产生一定的干扰,影响视觉识别能力。
不过需要注意,视频中雨刮器工作的频率不高,同时前风挡玻璃上的雨滴也比较少,可见当时应该下着小雨,对Mobileye的成熟算法来说,应该影响较小。

▲事故当天在下雨
几位自动驾驶从业者告诉车东西,视觉真正受影响的关键在于被撞五菱宏光的位置。
当时五菱宏光的车主下车在后方布置警示牌,同时五菱宏光又停在了车道线偏左、靠近隔离带的位置。
从ES8的视角来看,五菱宏光车主和车身之间有一定的重叠。

▲事故时,行人和前车有重叠
“视觉算法会依靠车轮、尾灯等特征点进行识别,行人跟车辆重叠在一起,很容易干扰识别算法。”一位车企的自动驾驶负责人这样向车东西解释道。
至于毫米波雷达,车东西询问了来自车企、Tier1和自动驾驶公司的相关专家后,也弄清楚了背后的多重复杂原因。
首先需要知道蔚来与博世的合作模式才能推测可能性。
据介绍,车企在选购博世的MMR第四代毫米波雷达时有两种模式,一是雷达直接给车企提供32个原始目标,并且告知是静止还是运动目标。
在这种模式下,需要车企自行结合视觉算法,来判断静止物体是汽车还是其他障碍物。
第二种模式下,博世会根据自己的经验和能力,基于毫米波雷达的RCS反射面积和不同帧之间反射点情况,从32个原始目标中筛选出功能安全目标——即车辆需要做出反应的目标。
“给原始目标的话,那么大一个五菱宏光不可能探测不到。”一位自动驾驶公司的专家向车东西说道,“但雷达并不知道那是个什么东西,需要视觉算法来进行分类才能做出反应。”

▲事故现场(图源@跑不动的小狐狸)
所以如果蔚来是直接拿原始数据,毫米波雷达几乎不可能感知不到前车,只能说蔚来的NOP系统没有合理使用雷达数据。
如果是第二种合作模式,博世的雷达自己会进行目标筛选,这里存在两种可能。
一种是博世的算法将这台五菱宏光当成不相干的静态物体过滤掉了。另一种可能是需要到很近的距离(30米左右),博世的算法才将前车识别为功能安全目标。
当然,如上一部分所言,因为毫米波雷达不是主传感器,所以不管毫米波雷达如何发挥,最终的结果都是发生了碰撞。
六、毫米波雷达为什么怕静止车辆?
从上一部分的结论来看,不管是蔚来还是经验丰富的博世,在碰到这种静止车辆场景时,毫米波雷达都存在较大的不确定性——即使雷达回波告知前方有目标,也很难对其准确分类,以确定行为策略。
这是毫米波雷达的探测原理,以及目前的技术现状共同决定的。
东南大学国家毫米波重点实验室毫米雷达技术专家、毫米波雷达公司隼眼科技CTO张慧向车东西解析了其中的多种原因。
从最底层的工作原理来说,毫米波雷达主要是依靠多普勒效应来感知移动目标。多普勒效应的特性是,动态对动态最容易感知、动态对静态较难感知、静态对静态极难感知。
这是因为如果前方车辆静止,目标信息容易和地杂波等掺杂在一起,需要一定的算法才能从中分辨出目标。而如果是一个行驶中的汽车,基于其多普勒信息,从而比较好探测到目标。
但目前像是博世、大陆等企业的雷达工程师们早就解决了从地杂波中识别静态物体的问题,为什么还是没法准确识别静止车辆呢?
这里就跟当前毫米波雷达的技术现状有关了——一般的毫米波雷达没有高度信息,同时空间分辨率不足。
没有高度信息,意味着雷达很难区分横穿马路的路牌和桥下的车;空间分辨率不足,意味着两个距离很近的物体,其回波会被混在一起,很难知道有几个目标。

▲道路中央的路牌
“这个场景中五菱宏光车身和护栏挨得很近,并且都是静止状态,这个时候雷达对于这两个目标的区分就得依靠角分辨率来实现了。在较远的距离雷达反射点混在一起,要到很近的距离才能区分护栏和车辆。”承泰科技CEO陈承文这样告诉车东西。
如果很难区分,把静态目标错误的识别为车辆,然后进行刹车会严重影响用户体验,甚至增加事故,所以一些雷达公司和自动驾驶公司会选择将静态物体(包括车)过滤掉,来减少误触发的情况。
不过据了解,博世、大陆、承泰科技等新老雷达企业,已经可以通过不同物体RCS反射面积的不同和不同帧之间的反射点的不同来区分路牌、立交桥和车辆。
“确实存在这样的技术,但是根据我们的实测,单纯用毫米波雷达区分静态物体和静态汽车的准确率并不算高。”一位车企自动驾驶负责人这样向车东西说道。
那么问题又来了,不同物体的RCS反射面积不同,比如汽车和立交桥的反射面积不同,为什么不能通过区分RCS来确定不同的物体呢?
“这是因为不同形状、材质的物体,RCS都不相同。而即使是同一个物体,不同角度的RCS也不相同,车载场景下变量太多暂时很难以简单通过RCS来确定一个物体的类型。”东南大学国家毫米波重点实验室毫米雷达技术专家、毫米波雷达公司隼眼科技CTO张慧说道。
“最典型的例子就是B2、F117等隐形飞机,虽然飞机很大,但通过吸波材料覆盖机身,其RCS却很小。”他说道。
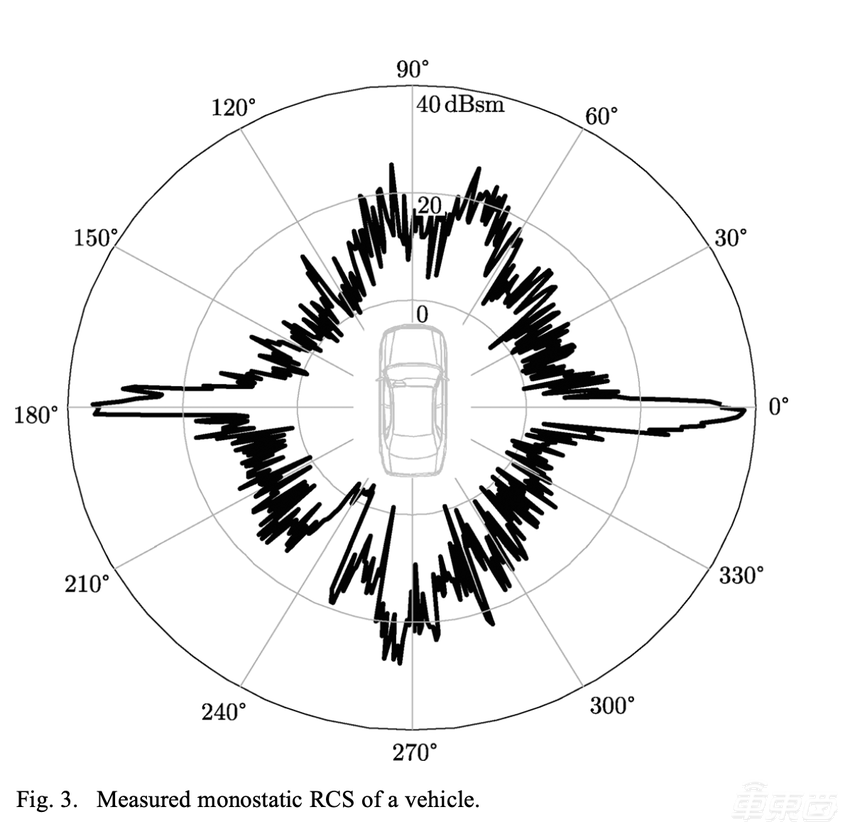
▲不同角度下,汽车的RCS不同
这么看下来,毫米波雷达确实存在很多限制。但好消息是博世、大陆等企业都在积极研发高分辨率、成像毫米波雷达等新一代的产品。
比如博世的第五代毫米波雷达就极大地增加了点云密度,进而大幅提升了感知能力,对静态车辆的识别也会越来越好。
当然,对于车企来说,最简单粗暴的做法就是在现有摄像头和毫米波雷达基础上,再引入激光雷达,甚至是多个高线束激光雷达,更是能够大幅提升感知能力。
比如蔚来的新车ET7就直接装了一个Innovusion的等效300线的高精度激光雷达。
▲蔚来下一代自动驾驶技术采用激光雷达
结语:一线车企必须走全栈自研之路
从蔚来车型的竞争力和本次事故来看,一线车企几乎必定会选择自研自动驾驶技术,并且肯定会从部分自研往全栈自研转变。
一方面,车企要想更快地实现更多高级功能,增加产品竞争力,只能依靠自己。比如蔚来就是通过自研才能在特斯拉之后,推出第二个自动导航辅助驾驶系统NOP,在供应商那里暂时买不到类似技术。
另一方面,做自研还必须往全栈自研发展。
这次事故就是一个很好的例子,蔚来的视觉和毫米波雷达算法都来自供应商,蔚来的自动驾驶系统只能依靠对方提供的感知结果来决策,一旦感知系统出现问题或者拖了后腿,决策系统根本无能为力,最终导致出现事故,也成了蔚来的自动驾驶之“殇”。
只有将所有算法掌握在自己手中,才最稳妥。这也是为何在ET7发布时,蔚来高声喊出自己要做全栈自动驾驶的关键原因之中。
只不过,这条路非常困难。

