








车东西(公众号:chedongxi)
文 | 六毛
车东西9月15日消息,昨天下午,2020世界智能网联汽车大会在上海汽车城会展中心正式开幕。本届大会共举行两天。来自整车厂、供应链、科技公司的一众行业专家、从业人员齐聚在此,围绕智能网联汽车发展方向、发展路径以及发展过程中的难点等问题展开讨论。
今天举行的“智能网联汽车关键技术与政策研讨”分论坛上,舍弗勒大中华区首席技术官刘泳、法雷奥集团中国首席技术官顾剑民、千寻位置智能驾驶事业部总经理年劲飞,超星未来极挚(上海)科技有限公司CEO张剑和上海禾赛科技高级总监卢炜先后登台,从从业者的角度,分享了对于智能网联汽车技术的思考及其取的一些成果。
刘泳强调在推动智能网联汽车实现的过程中,车本身的进化同样重要、不应该被忽视。未来除了软件定义汽车,功能、场景、安全也将对汽车重塑产生影响。
顾剑民认为现阶段,车联网已成为实现自动驾驶的必要元素。卢炜则表示,主动抗干扰技术是自动驾驶激光雷达批量落地的前提,并进一步对禾赛科技的解决方案进行了具体介绍。
以下是分论坛的干货内容。
一、舍弗勒刘泳:定义未来汽车的不只是“软件”
汽车“四化”转型正带动着相关产业向新的领域不断探索。
舍弗勒大中华区首席技术官刘泳表示,在中国,智能网联汽车的发展已经基本确定为是走车路协同的路线。这意味着,车和路都要变得智能。
针对智能驾驶汽车的整体技术,舍弗勒将其分成了三个层次。
第一层涉及高精地图、高精定位、车路系统、通讯网络和云平台。
第二层从操作平台、车载感知系统一直到计算平台和维修平台。
第三层结合了智能座舱、电气化、底盘控制等。其中整车电子电气架构也不能忽略。
推动智能网联汽车实现的过程中,线控、安全冗余、网络安全和智能车机也都是传统汽车产业需要注意的部分。
与此同时,不断变化的技术也将给产业生态带来变革。刘泳认为,未来的汽车会由软件、功能、场景和安全等不同的角度来进行定义。
而回到当前,智能网联汽车的发展仍然存在一些潜在瓶颈问需要克服。首先是标准不完备,从汽车网络安全、线控技术到行业法律法规,制定完备的标准体系需要企业和相关机构共同推进。
其次,在法律法规上,出了事故谁来负责需要明确。再次是在技术层面,安全冗余与网络安全需要突破。刘泳强调,目前行业对汽车本身的转型重视度还不够。
那么如何解决这些问题呢?对此,刘泳认为需要先拥有一个整体的规划。不同的公司在整体系统中专注自己的事情,从而形成一股合力,帮助行业尽快发展。
刘泳还对舍弗勒的工作和成果做了一些介绍。舍弗勒下设汽车主机事业部、汽车售后事业部、工业事业部共三大事业部。
在智能网联汽车方面,据刘泳介绍,从2019年年底至今,舍弗勒中国团队做了几项研究,并将技术应用到两款Mover样车当中。
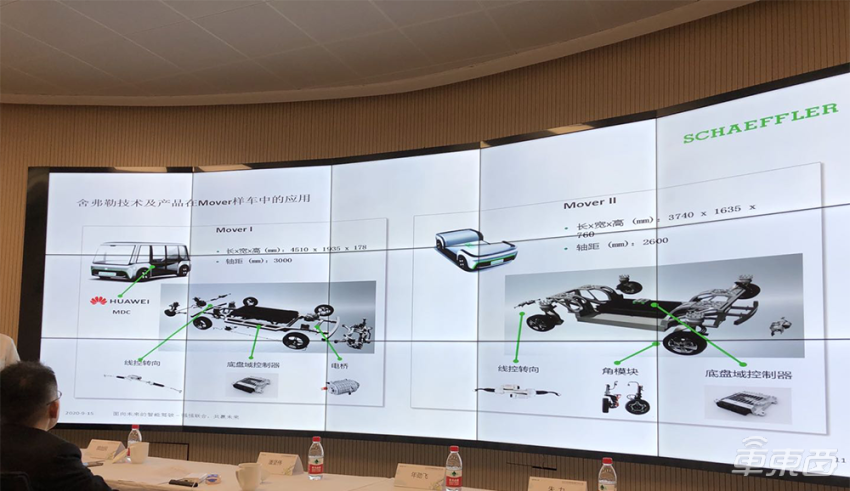
▲舍弗勒技术及产品在Mover样车中应用
值得注意的是,这里面有一个智能驾驶角模块。该模块将电驱动集成到轮毂电机中、同时还把转向和制动集成在了一起。车轮本身可实现90度转向。对于自动驾驶汽车来说,这意味着会有更大的灵活性。
二、法雷奥顾剑民:车联网是智能网联汽车的催化剂
在法雷奥集团中国首席技术官顾剑民看来,未来智能网联汽车发展会有几个趋势。首先是自动驾驶正在加速发展。其次,车联网将成为催化剂。最后,移动出行体验将成为一个重要的卖点。
就车联网而言,顾剑民认为,虽然车联网最初诞生时和车载娱乐关联度更大,但现如今,这一技术事实上已经成为了自动驾驶的必要元素。
车联网不仅可以更好地保证行车安全性和舒适度,还可以让交通变得更通畅,同时减少排放。
顾剑民对法雷奥在车联网方面的一些具体方案进行了介绍。
例如,超级视距技术(XTRAVUE)可以通过V2V技术,与前车相连,赋予自己的汽车另外一双“眼睛”。从而更好地解决超车遇到视野盲区,以及“鬼探头”等场景。
▲超级视距技术(XTRAVUE)功能演示
借助于5G的赋能,法雷奥虚拟感知技术(VOYAGE XR)支持实现沉浸式虚拟交互,能帮助车内的人和车外的人进行互动,同时也能作为一个安全助手。
至于遥控自动驾驶(DRIVE4U REMOTE),则可以在向高级自动驾驶过渡的过程中,充当并具备“安全备份”的作用。
演讲最后,顾剑民也谈到了自己对行业生态变化的看法。
新的用途会定义出新的需求。当前,为车企生产私家车提供关键部件依然是法雷奥的主要业务所在。变化在于相比于之前,法雷奥的业务边界正在不断扩展。除了私家车,法雷奥也需要为无人驾驶小巴、无人物流车和无人驾驶出租车赋能。
此外,原本的整车厂和供应商之间明晰的关系边界正变得模糊,彼此之间的关系是动态的。按照顾剑民的理解,这也属于一种跨界融合。
三、千寻位置年劲飞:另有四款搭载千寻定位解决方案的车型将亮相
千寻位置智能驾驶事业部总经理年劲飞在演讲中表示,AI加上IoT构成了AIoT时代。在这样一个时代中,通信、时空、计算将成为三大基础能力。
其中,“时空”能力的重要性体现在两个方面,一是需要无处不在,一是需要对于空间和时间的把握更精准、更安全。
从理念上,千寻位置将这种能力定义为“时空智能”。按照年劲飞的说法,“时空智能”就是指可以满足AIoT时代智能机器所需要的高精度定位、精准定位等需要的能力,一般而言这需要能够实现动态厘米级定位、静态毫米级感知和纳米级授时。
“时空智能”有三个作用,可概括为时空基准,相当于大家有一个可以沟通的话语体系。时空感知,车内也能够获得精准的速度、时间、航向等信息。第三点是时空协同。
从应用看,“时空智能”在智能驾驶上的应用包括两类,既包括单车智能也包括车路协同。
年劲飞进一步谈到了“时空智能”在智能驾驶全链路上的应用。

▲智能驾驶全链路应用
整个架构当中,位于最下方的是最基础的能力,包括云服务、高精度定位硬件以及高精度地图。再往上,分别是智能引擎、服务中台和具体的生态应用。
目前,千寻位置已经推出了量产级高精度定位解决方案FindAUTO。年劲飞在现场表示,除了已经亮相的广汽Aion LX和Aion V两款车型,年内还将有四款搭载了FindAUTO的量产车面世。
四、超星未来张剑:计算平台要量产不可以只考虑算力
关于汽车智能化的发展走向,超星未来极挚公司CEO张剑认为可以看到四个趋势。
首先是汽车电子电气架构正向集中式演进,预计未来将会演变为中央计算式架构。未来,智能网联汽车的价值和个性化、差异化主要体现在软件和服务方面。
同时,主机厂会积极打造配备智能驾驶功能的量产车型。而以特斯拉为代表的造车新势力崛起,也将加速推进传统主机厂变革。
张剑表示,计算平台将是这个过程中的重要一环。计算平台本身就是融合软硬件于一体的解决方案。车载智能计算平台将会成为新型汽车电子电气架构的核心、自动驾驶智能汽车的“大脑”。

▲智能驾驶计算平台的基础架构
张剑对超星未来智能驾驶计算平台做了进一步的介绍。
在基础架构上,其智能驾驶计算平台的最底层属于异构硬件平台,其中包括MCU、通用的CPU处理器等。异构硬件平台之上,是系统软件层和工具链层。在整个计算平台之上,是更为具体的应用模块。
张剑还强调了超星未来计算平台在提升系统能效比上的表现。
在他看来,要想计算平台能够量产,不能只考虑算力。灵活性、开放性、功耗、成本和时延都是需要考虑的因素。
针对这些问题,超星未来决定从整体上去提升计算平台的综合性能,走软硬件协同、定制化设计的路线,同时又采用了软件协同优化的方式来提升硬件能效比。
事实上,就计算平台的技术发展路线,张剑也分享了自己的看法。他将其概括为计算平台的“四化”转型,即硬件异构化、软件标准化、工具自动化以及应用模块化。
五、禾赛科技卢炜:抗干扰技术是自动驾驶激光雷达批量落地的前提
禾赛科技分享了其在自动驾驶激光雷达上的最新成果。
演讲开始,禾赛科技高级总监卢炜先开启了“自黑”模式。
卢炜表示,从研发激光雷达到实现激光雷达真正落地,公司客户的投诉确实帮助他们发现了很多细节问题,例如激光雷达在下雨的时候是不是还能“防水”,以及他在今天要谈到的串扰现象。
激光雷达是通过不断发送、接受激光脉冲,来实现对周边物体的距离的测量,进而完成对环境的建模。
而按照卢炜的说法,道路上安装激光雷达的车辆增多,使得激光雷达之间发生串扰的几率呈指数级上升。
在这种情况下,如果没有抗干扰功能,激光雷达会把邻近激光雷达发出的激光脉冲信号,错误地当成自己发出的激光脉冲产生的回波,从而导致对障碍物的判断错误。
这种情况表现在点云图中,就是一团团快速移动的噪点。
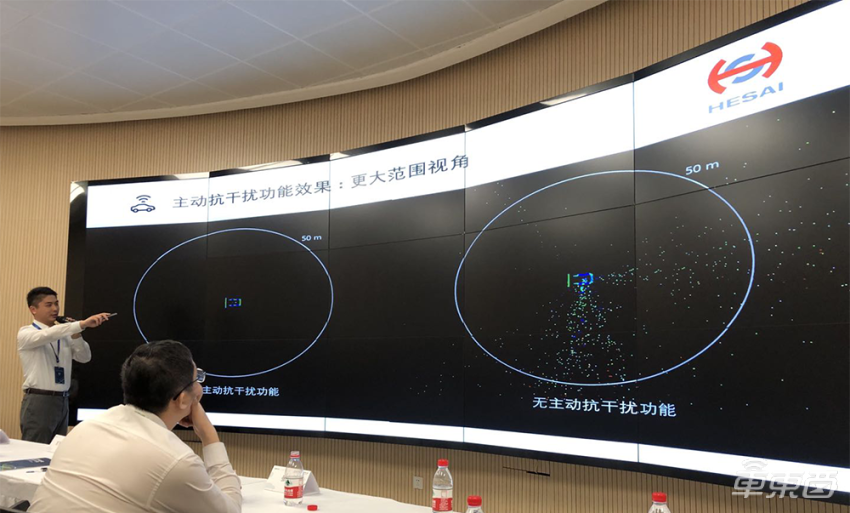
▲有无主动抗干扰功能的效果对比
那么,如何解决这个问题?
通过设计算法来过滤噪点的做法,通常会遇到一些挑战。例如,串扰可能会来自不同类型的激光雷达,这给过滤算法本身的建模和训练就会带来困难。能够正确地过滤噪点其实也是一项挑战。
而利用隔绝路径以规避信号干扰,以及利用相位角锁定的技术方案,均没有办法解决发生在不同汽车上激光雷达间的串扰问题。
最后,禾赛科技给出的方案是让激光雷达自带主动抗干扰功能。其工作原理是通过激光雷达发射带有独特“指纹”的信号,在接受回波时,激光雷达只接受相同指纹的回波,指纹不匹配的信号则会被拒绝掉。
结语:智能网联汽车落地前也需要“精打细磨”
未来的汽车会是智能网联汽车,这已经成为行业共识。与此同时,智能网联汽车在我国得到了政策的大力支持,其未来发展前景可期。2020世界智能网联汽车大会的举行也为此提供了佐证。
大方向已定,接下来的问题是如何去做。
出席今天分论坛的企业玩家所分享的内容,从底层技术架构、激光雷达的技术难题到在智能座舱上的具体应用,不一而足。
这既说明当前智能网联汽车正发展得如火如荼。同时也在一定程度上意味着智能网联汽车真正实现前,依然会有一个上下求索的过程,其间还有许多的细节问题需要被解决。

