车东西(公众号:chedongxi)
文 | Origin
9月20日,由智东西联合CAPE、极果主办的GTIC 2018全球智能汽车供应链创新峰会在重庆召开,大会邀请到来自学术界、整车企业、互联网公司、汽车零部件厂商、电信运营商、自动驾驶新兴公司、车联网企业等智能汽车供应链各领域核心公司30余位专家、高管一同登台,分享对智能汽车最前沿的见解。
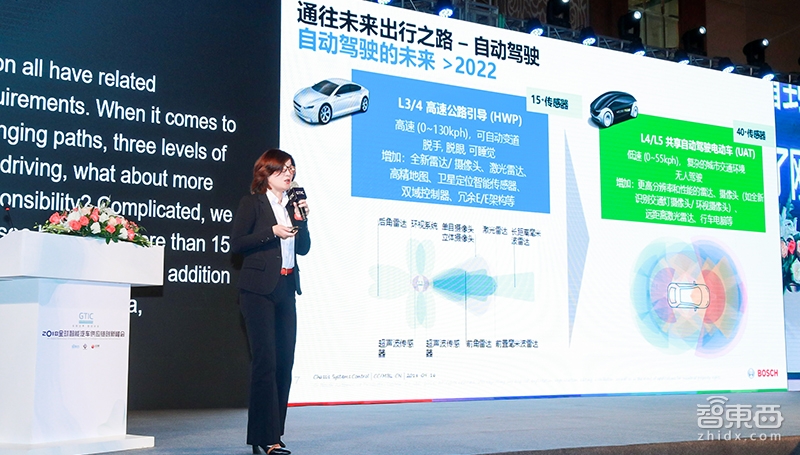
博世底盘控制系统中国区副总裁(驾驶员辅助业务单元)蒋京芳在大会上发表了演讲《通往未来出行之路——自动驾驶》,就自动驾驶的实现路径与进行探讨。
蒋京芳详细介绍了博世为自动驾驶在硬件与软件算法上所作的准备,以及分阶段实现不同自动驾驶功能的总体规划。她表示,博世与戴姆勒合作的自动驾驶出租车最早将于2022年投放市场,而L3级别的驾驶辅助将在2021年应用在乘用车上。
一、博世自动驾驶三管齐下,L3级自动驾驶2021年量产
作为汽车行业幕后的英雄、下游公司离不开的上游供应商,博世对整个行业的自动驾驶气候有一个全面的感知。蒋京芳在演讲中,将自动驾驶划分了三大场景——
城市工况共享自动驾驶,对应科技公司与初创公司偏爱的无人出租车、无人小巴等;
中高速道路上的自动驾驶,对应主机厂正在开发的、乘用车与点对点运行商用车上搭载的交通拥堵引导以及可以变道的高速公路引导等功能;
低速、封闭场景自动驾驶,对应低速泊车,以及港口、机场、园区等封闭区域内的各种自动驾驶。
博世从这三个主要的场景出发,制定了一张博世在中国的自动驾驶路径图。
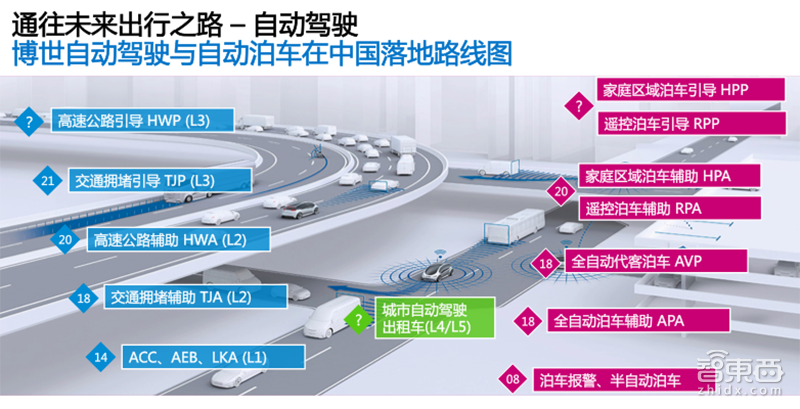
目前,在中高速场景中,属于L2级别自动驾驶功能的TJA(Traffic Jam Assist)交通拥堵辅助已经于今年实现了量产装车,可以在拥堵的快速路上实现“脱手”驾驶。
博世在这一场景要量产的下一个自动驾驶功能是车辆可以自行变道的HWA(Highway Assist)高速公路辅助,与特斯拉的AutoPilot相似,博世为其规划的上市时间在2020年。
而博世的首个L3级自动驾驶功能——交通拥堵引导TJP(Traffic Jam Pilot),会在2021年实现量产。
在这些功能实现后,博世会再挑战自动化程度更高、难度更大的高速公路引导HWP(Highway Pilot)。
而对无人出租车这一新兴的模式,博世与戴姆勒结成了合作伙伴关系,双方联手打造的自动驾驶出租车将在2022年左右投放海外市场——博世并不会一开始投放纯粹的“无人出租车”,而是分阶段“进化”。第一阶段自动驾驶出租车可以一键召唤,自动开到人身边,但随后的驾驶任务由人类完成;第二阶段再实现真正的全程无人驾驶。
而在低速自动驾驶场景,博世目前主攻泊车。今年一些新车型搭载的,就是博世的新一代全自动泊车辅助APA(Auto Parking Assist)。蒋京芳提到博世在自动泊车上下一个重点功能是遥控泊车辅助RPA(,届时驾驶员无需在车辆附近也可以遥控停车,不过要到2020年才能实现。
要实现车辆自己找车位、自己停车的完全自动化泊车,还需要车辆和网联设施的通信,而博世今年与奔驰进行过相关的展示。这一功能的实现有待基础设施和技术的进一步成熟。
在现场,蒋京芳还展示了5款搭载L2级别自动驾驶的自主品牌车型:吉利博瑞GE、长安CS55、长城VV6、吉利缤瑞、上汽Marvel X。从理论上说,在功能限定的场景下,这些车辆可以“放手驾驶”60秒。她预计,2019年会有数十款搭载L2级自动驾驶功能的车型上市。
二、四大传感器三大算法升级 应对自动驾驶难题
在L2级自动驾驶功能逐渐量产后,博世目光也更多地瞄向了L3级及其以上的自动驾驶功能。这个过程中,博世遇到了不少挑战,同时也见招拆招。
蒋京芳在现场指出,从L2级自动驾驶到L3,“是一个非常大的质的飞跃”。
仅仅是相对简单的L3级交通拥堵引导,就需要5个新一代毫米波雷达、双目摄像头、驾驶员状态检测摄像头以及另外的超声波雷达和环视摄像头支持。如果是要求更高的高速公路引导,则需要15个以上的传感器,包括激光雷达,还会同时引入绝对定位与相对定位,另外域控制器算力也需要升级,并准备两套作为冗余。
作为应对这些挑战的筹码,博世的第六代超声波雷达已经于去年投放市场。明年,博世的第五代毫米波雷达与第三代单、双目摄像头也会上市。同时,博世还在开发激光雷达。四大传感器一同升级,为自动驾驶做好准备。
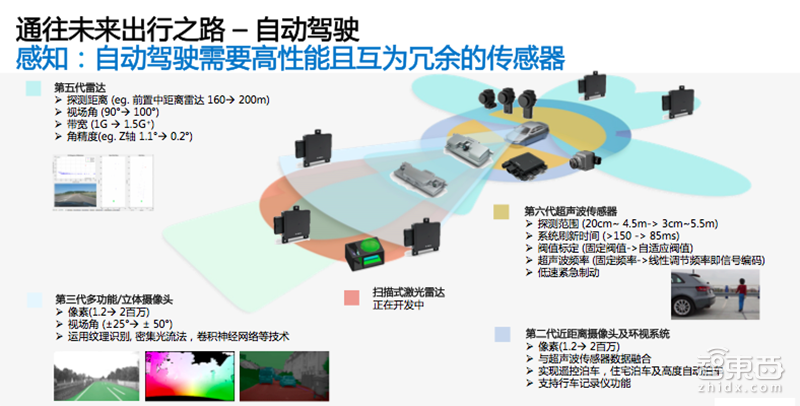
▲博世的自动驾驶传感器矩阵
在参数上,第五代毫米波雷达的探测距离从160米提高到200米,点云密度提高10倍。而作为关键传感器的摄像头不仅会把像素从120万提高到200万、视场角从25°提高到50°,还将引入、更新基于摄像头的三大核心算法。
首先,在传统的方案上,博世会增强分类器引擎,提高对目标判断的精确度;
其次,博世引入了卷积神经网络,并对其进行优化、压缩,降低了功耗,可以集成在嵌入式芯片上。在现场演示视频中,博世的卷积神经网络算法在没有车道线的情况下也对可行驶区域有较好的识别效果。

▲博世智能摄像头CNN算法演示
最后,博世会用密集光流法替代目前的稀疏光流法,提高暗光环境下对物体的感知能力以及对小型物体的感知能力。
这些算法融合起来后,博世的下一代摄像头会更加智能、识别能力更强,搭配其他更新的传感器,博世的自动驾驶传感器已经组成了一个“豪华阵容”。
三、多重冗余保障安全 在线验证迭代自动驾驶
作为一家老牌的汽车行业龙头企业,技术的可靠性可以说是博世的立命之本,“安全”也是蒋京芳演讲中的高频词。
博世对自动驾驶安全的一个直接回答是——冗余。博世自动驾驶方案的冗余设计,贯穿到了自动驾驶实现的整个过程中。自动驾驶的感知、定位、决策、执行四大技术环节,博世都有完整的布局。
在自动驾驶的感知层面,博世的超声波雷达+毫米波雷达+摄像头多传感器方案本身已经能够形成较好的冗余方案。
到自动驾驶定位环节,博世也有两套方案。博世一方面引入了GPS的绝对定位;另一方面,博世也推出了“博世道路特征”功能,通过车载摄像头的图像与高精度地图比对来实现相对定位。
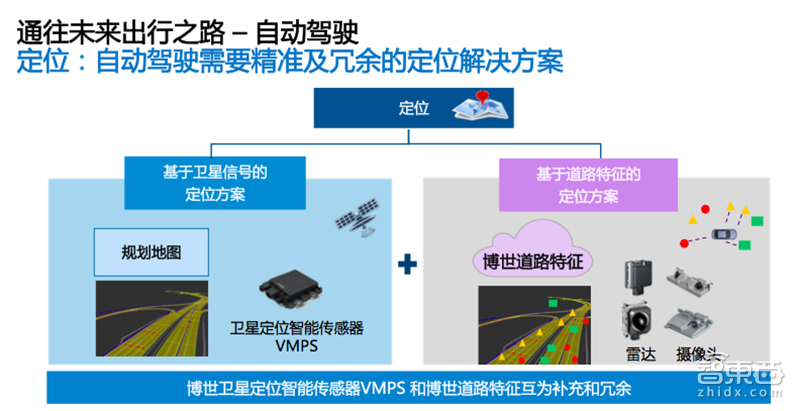
▲博世自动驾驶定位方案
而在决策层面,上文提到,博世在L3级的自动驾驶功能中,会配置两套核心运算单元(即域控制器)。与之对应的,整车的电子电气架构也会有做冗余设计。
在执行层面,车辆的转向与制动都需要冗余。而博世的黄金搭档——ESP 9.3与iBooster形成了整车制动的双重保障,任一一个系统失效后另一个都能提供足够的制动力帮助车辆紧急刹车。而博世转向事业部的新一代带有冗余的电子助力转向ESP,明年底也会投放市场。
在自动驾驶的各个关键环节,博世都已经提供了冗余的方案来应对系统失效问题,从而保障安全。
除了车辆硬件架构的冗余,博世另外的保障自动驾驶安全的方案是在功能应用前的验证环节上想办法。
蒋京芳提到,自动驾驶验证需要考察很多极限场景,而这是传统的道路验证难以满足的。因此博世在使用仿真的验证手段,搭建仿真场景来进行测试。
博世的另一种验证方法,则是硬件配好、软件算法随后升级的迭代模式。在这种模式下,博世会先把L2级自动驾驶功能投放市场,然后通过车辆在道路上收集的数据,与既有算法不断比对,最后对算法进行优化,最终实现L3级自动驾驶的升级。博世将这种方法称为“在线验证”。
结语:自动驾驶绕不开的巨头
蒋京芳在演讲中分享到,博世是从ADAS领域逐步升级到自动驾驶,真正研发高度自动驾驶始于2010年。而根据德国科隆经济研究所的数据,博世的自动驾驶专利,达到了近1000项,在全球企业中排名第一。
从博世展示的自动驾驶相关技术来看,博世确实做到了对自动驾驶各环节的全覆盖,在辅助驾驶过渡到自动驾驶这条道路上排位前列。作为全球最大的汽车行业Tier-1,博世给外界的印象一直是技术强势且全能,“造车绕不开博世”。在自动驾驶时代,这种评价仍然没有过时。
不过,博世作为自动驾驶产业链中的一员,对产业协作的力量认知很清楚。蒋京芳最后称,当自动驾驶的朝向L3级别以上发展乃至想要在局部区域落地自动驾驶,需要更多的跨界合作,以及政府机构的参与,才能实现共赢。